




点击下方卡片,关注“3D视觉之心”公众号
第一时间获取3D视觉干货
三维重建综述:从多视角几何到 NeRF 与 3DGS 的演进
A Survey of 3D Reconstruction: The Evolution from Multi-View Geometry to NeRF and 3DGS
摘要
三维重建是计算机视觉与图形学的交叉核心,也是虚拟现实、增强现实、自动驾驶、数字孪生等前沿应用的“数字底座”。近年来,以神经辐射场(NeRF)和三维高斯抛雪球(3DGS)为代表的新视角合成技术,使重建质量、速度、动态适应性同时跃升。本文系统梳理:
传统多视角几何(SfM→MVS)的原理、流程与瓶颈
NeRF 隐式表达在质量、效率、稀疏视角、动态场景上的四年迭代
3DGS 显式高斯原语的实时渲染、动态重建、编辑优化
跨方法、跨指标的多维对比
未来挑战与可能突破方向
为数字孪生、智慧城市、元宇宙等领域的研究者提供一张“技术演进全景图”。
1 引言:为什么三维重建再次成为“风口”?
应用 | 对重建提出的新需求 |
|---|---|
城市级数字孪生 | 公里级范围、厘米级精度、分钟级更新 |
自动驾驶仿真 | 动态交通流、实时语义、可编辑车道 |
AR/VR 社交 | 轻终端、>90 FPS、照片级真实感 |
工业数字工厂 | 弱纹理、反光、复杂拓扑完整建模 |
传统“先几何后纹理”的管线已无法满足上述需求;NeRF 与 3DGS 通过“可微渲染”把“几何-纹理-光照”统一学习,打开了从“离线静态”到“实时动态”的窗口。
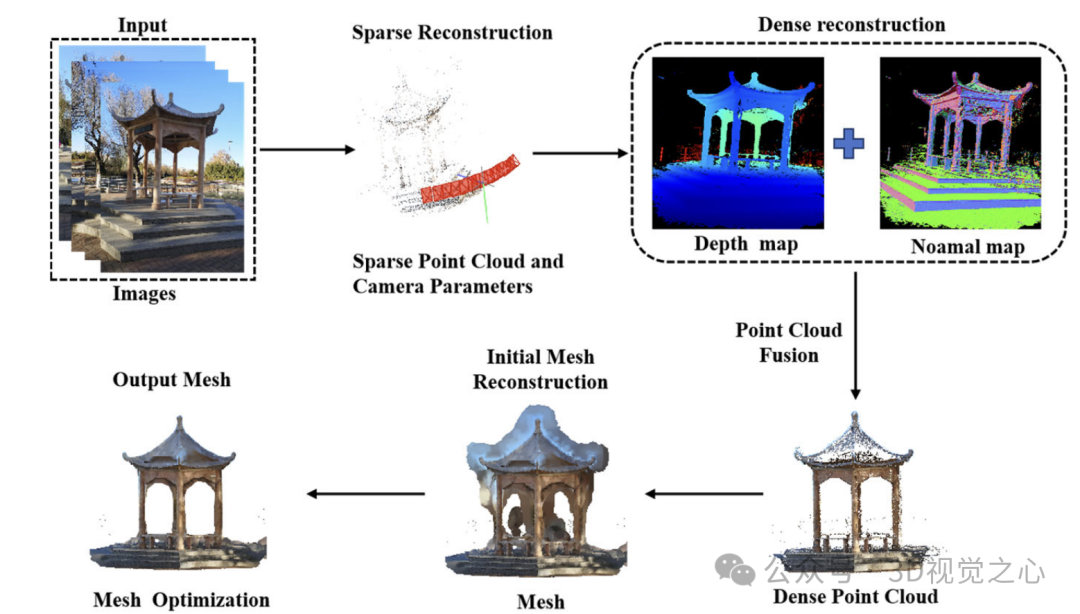
2 传统多视角几何重建(SfM→MVS)
2.1 完整管线图示
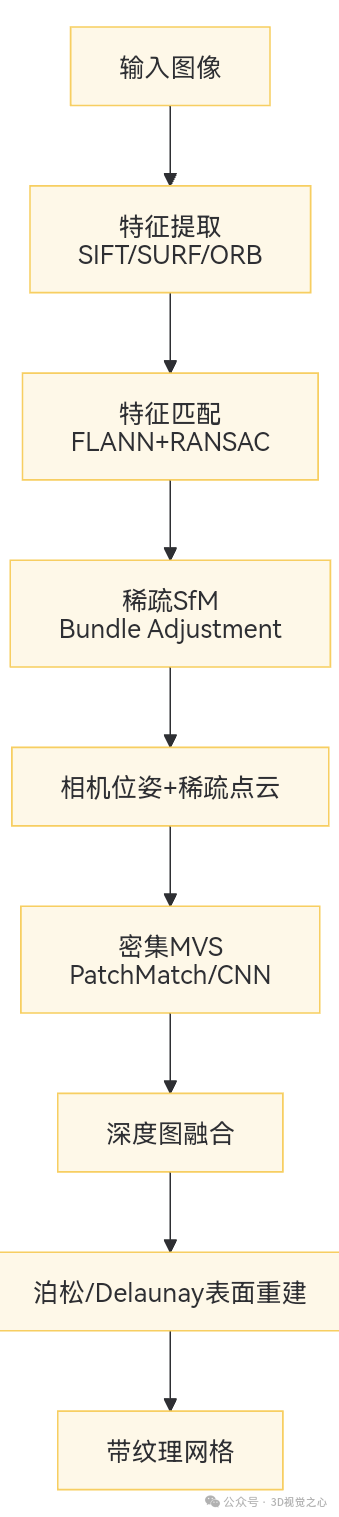
2.2 理论基石
对极几何:
x'^T F x = 0三角测量:
X = argmin(∑‖π(P_i,X)−x_i‖^2)束调整:
min ∑‖x−π(P,X)‖^2 + λ‖P−P_0‖^2
2.3 成熟工具链
工具 | 特点 |
|---|---|
COLMAP | 学术最常用,CPU 优化 |
OpenMVG | 模块化,适合算法研究 |
Agisoft Metashape | 商业级,支持无人机影像 |
ContextCapture | Bentley 城市级解决方案 |
2.4 五大痛点
数据饥渴:需>70% 航向重叠+60% 旁向重叠
弱纹理空洞:玻璃、白墙、水面、天空
光照敏感:阴阳面色差→纹理接缝明显
动态失效:行人、车辆→重影/鬼影
编辑困难:改一棵树要重跑全流程,迭代成本∞
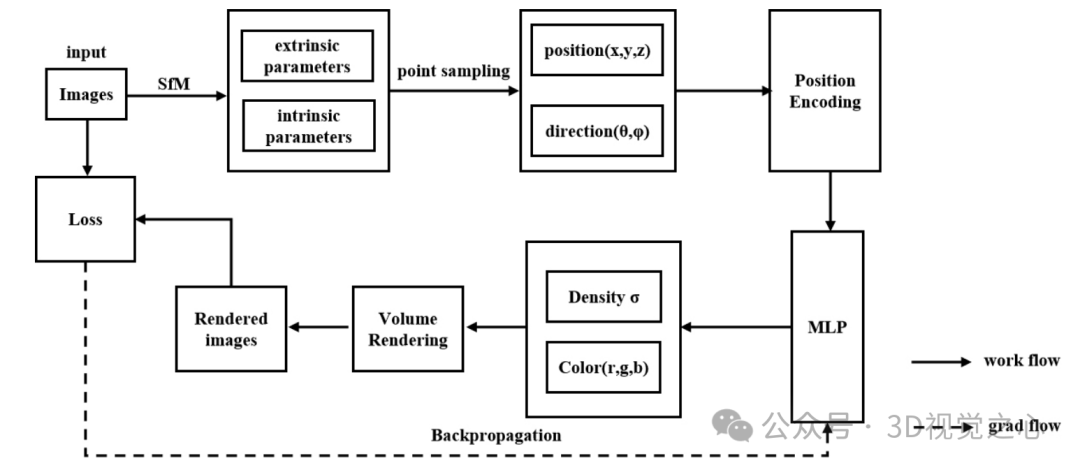
3 NeRF:隐式神经辐射场(2020-2024)
3.1 基础框架
把场景建模为连续 5D 函数:
通过体渲染积分得到像素颜色:
3.2 质量提升路线(2021-2023)
方法 | 关键创新 | 解决的问题 | 代价 |
|---|---|---|---|
Mip-NeRF | 锥体追踪+集成位置编码 | 锯齿、混叠 | 训练×2 |
NeRF-W | 外观嵌入+可变光照 | 天气/曝光变化 | 推理需调 latent |
NeRF++ | 反向球面背景+双层场景 | 远景退化 | 参数量+30% |
NeRFLiX | 退化模拟器+视角混合 | 伪影、噪声 | 需合成数据预训练 |
BAD-NeRF | 运动模糊物理模型 | 模糊输入鲁棒 | 需已知模糊核 |
UHDNeRF | 隐式体+稀疏点云高频 | 8K 超高清 | 显存↑ |
3.3 效率优化路线(2022-2024)
方法 | 加速核心 | 训练时间 | 渲染 FPS | 显存 |
|---|---|---|---|---|
InstantNGP | 多分辨率哈希编码 | 5 s–1 min | 5 | 1.2 GB |
TensoRF | CP 分解+低秩近似 | 10 min | 10 | 300 MB |
NSVF | 稀疏体素八叉树 | 30 min | 15 | 500 MB |
Zip-NeRF | 抗锯齿网格采样 | 20 min | 20 | 400 MB |
Lightning NeRF | 点云先验初始化 | 8 min | 10 | 600 MB |
采样方式对比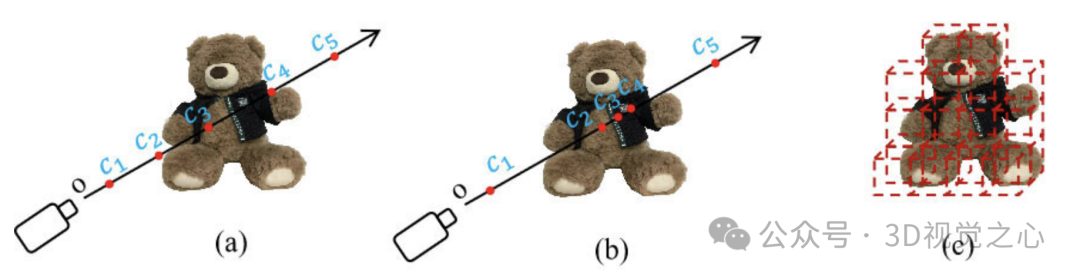
3.4 稀疏视角合成(<10 张图)
方法 | 正则/先验 | DTU 3-view PSNR↑ | 备注 |
|---|---|---|---|
FreeNeRF | 频率正则+遮挡正则 | 19.92 | 零额外开销 |
FlipNeRF | 反射射线过滤 | 19.55 | 减少漂浮物 |
MixNeRF | 混合密度+深度估计 | 18.95 | 提升几何 |
HG3-NeRF | 几何-语义-光度分层 | 19.37 | 需语义标签 |
3.5 动态场景(视频输入)
方法 | 表征方式 | 关键创新 | D-NeRF PSNR |
|---|---|---|---|
Deformable-NeRF | 变形场 Ψ(x,t) | 正则化扭曲 | 29.8 |
NSFF | 场景流+静态/动态分解 | 可解释运动 | 31.5 |
DNeRF | 时间编码 γ(t) | 无需额外 mask | 29.6 |
NeRFPlayer | 静态+变形+新区域 | 流式播放 | 30.2 |
Tensor4D | 4D 张量分解 | 内存↓50% | 31.0 |
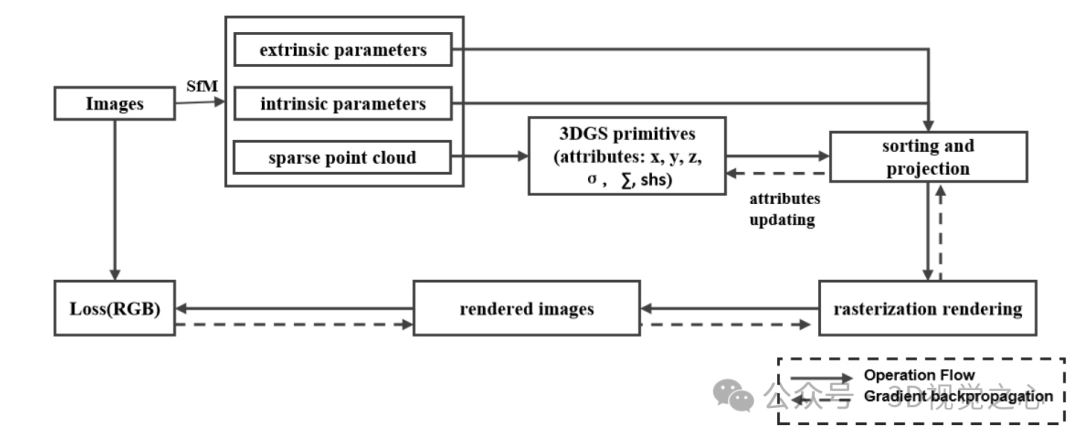
4 3DGS:三维高斯溅射(2023-2025)
4.1 基础公式
将场景表示为 3D 高斯集合:
投影到图像平面后按深度排序,做 α-混合:
4.2 渲染质量优化
方法 | 技术要点 | 结果 |
|---|---|---|
Mip-Splatting | 3D/2D Mip 滤波 | 抗锯齿,LPIPS↓10% |
Scaffold-GS | 锚点生长-剪枝 | 内存↓79%,覆盖↑ |
GaussianPro | 渐进传播+深度一致 | 低纹理 PSNR+1.7 dB |
GSDF | 高斯+SDF 双分支 | 几何误差↓30% |
SuperGS | 粗到细+梯度引导分裂 | 4K 超分实时 |
表4 MipNeRF360 对比
方法 | PSNR↑ | SSIM↑ | LPIPS↓ | FPS↑ | 内存(MB)↓ |
|---|---|---|---|---|---|
3DGS | 27.21 | 0.815 | 0.214 | 134 | 734 |
GSDF | 29.38 | 0.865 | 0.185 | – | – |
Scaffold-GS | 28.84 | 0.848 | 0.220 | 102 | 156 |
SuperGS | 29.44 | 0.865 | 0.130 | 47 | 123 |
4.3 效率再升级
方法 | 压缩/加速 | 结果 |
|---|---|---|
LightGaussian | 蒸馏+量化+伪视角 | 15× 压缩,200 FPS |
CompGS | K-means+游程编码 | 存储↓80% |
EAGLES | 轻量化编码 | 显存↓70% |
SuGaR | 表面网格提取 | 编辑友好,Poisson 重建 |
Distwar | 寄存器级并行 | GPU 原子操作↓60% |
4.4 稀疏视角重建(<10 张图)
方法 | 先验/正则 | 实时性 | 备注 |
|---|---|---|---|
FSGS | 单目深度+邻域上采样 | 200 FPS | 需预训练 DepthNet |
SparseGS | 扩散模型补全 | 实时 360° | 生成伪标签 |
LM-Gaussian | 大模型视觉先验 | 迭代细化 | 视频扩散 |
MCGS | 多视角一致性修剪 | 内存↓50% | 渐进剪枝 |
4.5 动态重建(视频)
方法 | 表征 | 关键创新 | D-NeRF PSNR |
|---|---|---|---|
Deformable 3D-GS | 变形场 | 时序正则 | 39.51 |
4D-GS | 神经体素+MLP | 分解 4D 特征 | 34.05 |
Gaussian-Flow | 双域变形 | 显式运动向量 | 34.27 |
DN-4DGS | 去噪网络 | 时空聚合 | 25.59(HyperNeRF) |
5 横向对比:一张表读懂三代技术
指标 | SfM/MVS | NeRF | 3DGS |
|---|---|---|---|
核心表征 | 点云+Mesh | 隐式 σ(x)+c(x) | 显式高斯集合 |
几何精度 | ★★★★☆ | ★★★☆☆ | ★★★☆☆ |
照片真实感 | ★★☆☆☆ | ★★★★★ | ★★★★☆ |
训练时间 | 小时 | 小时-天 | 分钟 |
渲染 FPS | <1 | <1 | 50-300 |
动态扩展 | × | 需变形场 | √ 时序高斯 |
编辑性 | 极难 | 隐式不可见 | 移动/删除/增改 |
硬件门槛 | CPU 即可 | 8× 高端 GPU | 1× 消费 GPU |
代表落地 | 测绘、文保 | 影视、直播 | AR/VR、自动驾驶 |
6 未来 5 年技术雷达
混合表征
NeRF+3DGS+SDF 统一框架:光滑表面用 SDF,高频细节用高斯,空洞用 NeRF 补全端侧实时
INT4 量化+TensorRT/ONNX → 手机 30 FPS 重建生成式重建
Diffusion 先验+3DGS:单图/文本 → 可驱动 3D 资产物理-语义联合
引入光照模型、重力、语义标签,一键可编辑城市场景多模态融合
LiDAR 深度、事件相机、IMU、Thermal 同步,SfM-free 鲁棒重建
7 结论:一句话总结
传统法:精度高、但“慢、死板、难编辑”
NeRF:画质天花板、但“训练慢、黑盒、难动态”
3DGS:质量-效率-动态-编辑四边形战士,正成为实时三维重建的“默认选项”
下一步,让每部手机、每台车、每副 AR 眼镜都拥有一把“实时数字化的瑞士军刀”——三维重建将真正走向“人人可用、处处实时”的普适计算时代。
【3D视觉之心】技术交流群
3D视觉之心是面向3D视觉感知方向相关的交流社区,由业内顶尖的3D视觉团队创办!聚焦三维重建、Nerf、点云处理、视觉SLAM、激光SLAM、多传感器标定、多传感器融合、深度估计、摄影几何、求职交流等方向。扫码添加小助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

扫码添加小助理进群
【具身智能之心】知识星球
具身智能之心知识星球是国内首个具身智能开发者社区,也是最专业最大的交流平台,近1500人。主要关注具身智能相关的数据集、开源项目、具身仿真平台、VLA、VLN、Diffusion Policy、强化学习、具身智能感知定位、机器臂抓取、姿态估计、策略学习、轮式+机械臂、双足机器人、四足机器人、大模型部署、端到端、规划控制等方向。星球内部为大家汇总了近40+开源项目、近60+具身智能相关数据集、行业主流具身仿真平台、各类学习路线等,涉及当前具身所有主流方向。
扫码加入星球,享受以下专有服务:
1. 第一时间掌握具身智能相关的学术进展、工业落地应用;
2. 和行业大佬一起交流工作与求职相关的问题;
3. 优良的学习交流环境,能结识更多同行业的伙伴;
4. 具身智能相关工作岗位推荐,第一时间对接企业;
5. 行业机会挖掘,投资与项目对接;


















 1318
1318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









