



日月更替,斗转星移。又到了金秋九月的开学季,校园里涌动的青春朝气与实验室里闪烁的代码光标遥相呼应。还记得十年前自己新学期踏进大学校园,看到无人小巴的震撼,也是那个时候第一次接触到了自动驾驶,现在想想就是那个时候埋下了投身自驾的种子。从16年开始,自动驾驶踏上了飞速发展的列车,整个世界都处于人工智能爆发的前夕,有些人因为自身的努力或幸运站在了潮头之上,激昂和困惑交织在每个人的心头。
自动驾驶十年沉浮
这十年,自动驾驶从最开始的瞒珊学步,ImageNet图像分类,到COCO目标检测、分割、跟踪,进化到nuScenes 3D世界感知,再到BEV大一统整个感知模块(3D检测/OCC/在线地图),又到今天的端到端、VLA。自动驾驶就像一个婴儿一样,终于快长大了。未来又会是哪个方向呢?VLA和WA会是终局么?L4自动驾驶还是具身智能抑或虚拟现实?可能是,也可能不是。但科技总归是朝着智能化的大趋势大踏步前进,保持跟进与学习是重中之重。
自动驾驶的十年征程堪称一部浓缩的产业进化史,十年前我很难想象人工智能会到今天的高度。2015年百度无人车在雾霾中完成城市道路测试时,行业曾天真地以为 L4 时代近在咫尺。无数先辈在这条道路上前仆后继,很多新势力倒下了,但更多的熬过来并愈发壮大。
十年后的今天,我们看到的不是科幻电影里的全自动场景,而是特斯拉、华为、理想、小鹏、蔚来、地平线、英伟达这些自动驾驶er们在现实路况中筑起的 "技术护城河"。自动驾驶的十年沉浮说明:真正的技术突破从来不是单点跃进,而是在现实约束下的持续攻坚。
坐得了冷板凳,下得了苦功夫。这是我的高中老师在很多年前对我说过的一句话,也希望传递给更多的同学。今年大一入学的同学,研究生最快要六年毕业,博士生最快要十年。自动驾驶远未结束,还需要源源不断的人才投身其中,真正的把安全做到极致,把性能做到极致,我始终相信自动驾驶终会到来,让我们一起迎接自动驾驶下一个十年。
创业的灵魂是创新
自动驾驶之心的定位一直是自动驾驶与机器人的学习平台,未来会是更加智能化的时代。三年时间,我们深刻地意识到创新才是企业持续的核心所在。成长与创新从来共享同套法则,创业没有捷径,创新亦如此。就像小鹏 VLA 模型需要 720 亿参数的模型根基,学术探索和工程实践也需要扎实的知识积累,人生的每个选择也需要现实场景的反复校验。
我们在一周年推文里面写过这句话:创新才能破局,真的深度思考才能输出有价值的内容,不然必将会惹来一地鸡毛。自动驾驶之心团队也将会始终保持创新、拿出创业者的姿态(不躺平、不自大)踏踏实实向前迈进!对行业保持敏锐的观察,以及极高的执行力。
做一个有温度的价值内容平台
我们一直在思考,什么样的平台才是大家喜欢的?怎么做才能长久?或者说什么才是有价值、有温度的?技术文章的分享固然是有价值的,但还远远不够,所以我们开启了和行业大佬交流,和学校同学的深入交流。
很喜欢雷总的一句话:优秀的公司赚取利润,伟大的公司赢得人心!自动驾驶之心一直以来给自己的定位就是学术界和工业界交流的桥梁,所以我们开发了一系列视频教程,整体来说今年的技术方向已经闭环:涉及VLA、世界模型、3DGS、感知、定位、融合、规划、仿真、预测、部署、CUDA、端到端、论文辅导、开发语言等,涵盖了近40个自动驾驶子领域,无论你想选择哪个方向都能找到对应的答案。
而在这些内容之上,我们真正想传递的是我们的价值观:对技术认知的价值观,持续学习的价值观,对事物认知的价值观。我们希望能够得到大家的认可,并虚心接受大家的批评和建议,因为只有虚心才会有更多的机会,这一点适合所有人。
这里也和大家聊一下我们课程和星球学员后面都去哪里高就了。首先国内领先的自动驾驶公司:像华为、理想、Momenta、蔚来、小鹏等是我们同学经常光顾的地方;一些芯片和AI公司,比如地平线、商汤科技、旷视等也是大家经常去搬砖的地方;还有很多去博世、NVIDIA等外企高就的;当然也有投身具身和大模型中的弄潮儿,以及清华、港科大、新加坡国立、UC 伯克利、卡耐基等名校继续深造的。不多不少,满满的成就感。

添加小助理咨询活动
值此开学季之际,我们也为大家准备了重磅学习礼包:
重磅推出499元超级折扣卡(一年期有效):购买后,享受全平台课程七折优惠;
自动驾驶之心知识星球立减88;
课程福利放送:满1000元赠送2门带读课程(八选二);
自动驾驶论文辅导1000最高抵扣10000;
自动驾驶1v6小班课限时福利立减1000;
全平台硬件优惠:
全栈教研平台黑武士001
足式/强化学习科研平台:TRON1
四足机械狗+机械臂科研平台
桌面级机械臂科研平台
数采夹爪(单臂+双臂方案)
超级折扣卡
重点介绍下我们最新推出的超级折扣卡!活动期间购买有效,自购买之日起一年时间内,购买平台任意课程均享受七折优惠,包括后续推出的新课程呦~

自动驾驶前沿课程
2025年我们重点推荐以下自动驾驶技术方向。
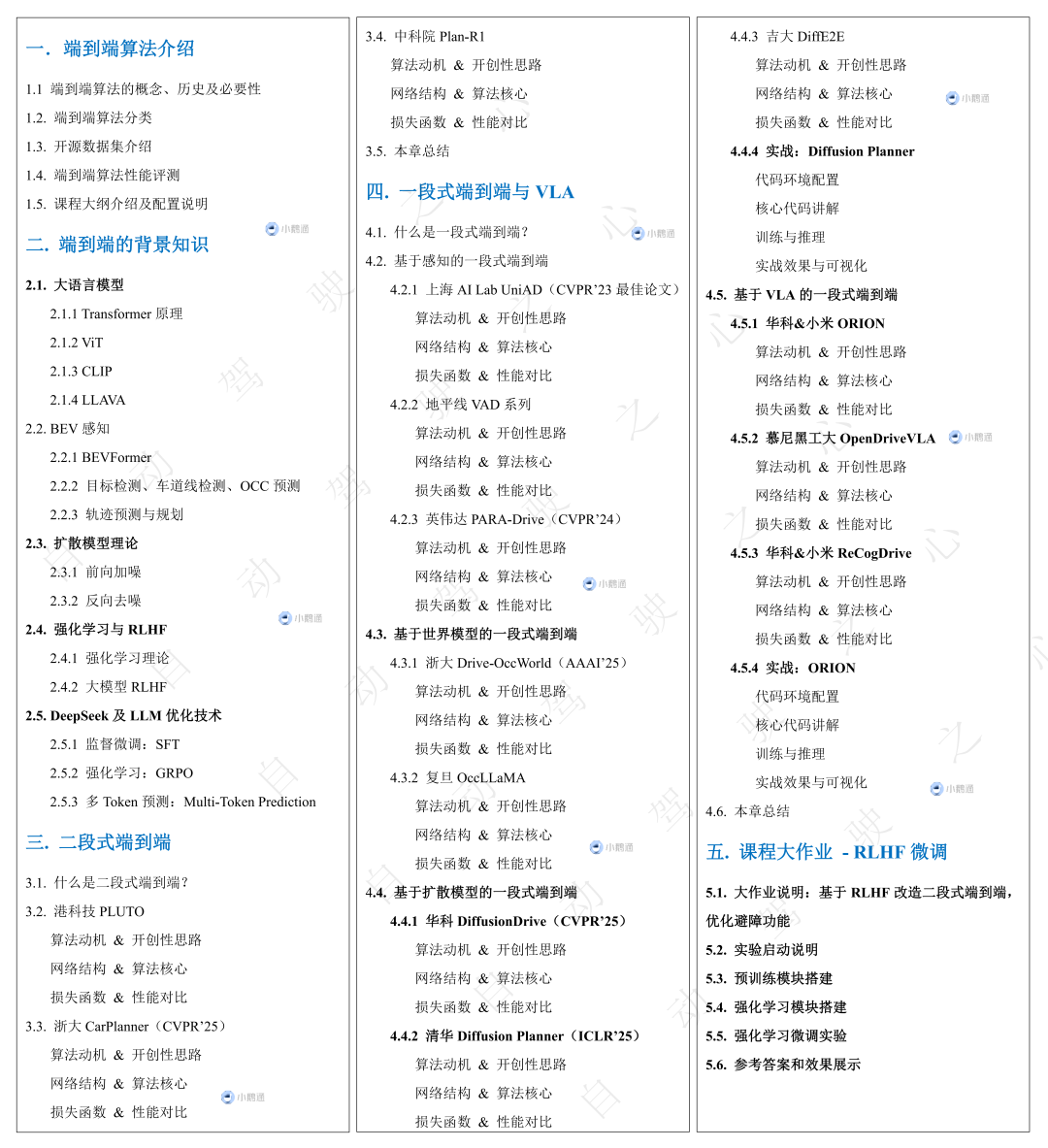
1)端到端与VLA自动驾驶
端到端自动驾驶(End-to-End Autonomous Driving)作为目前智驾量产的核心算法,可以分为一段式端到端、二段式端到端两个大的技术方向。自UniAD获得CVPR Best Paper以来,正式拉开了国内新一轮的智驾军备竞赛。2024年理想汽车更是宣布E2E+VLM的双系统架构量产!端到端自动驾驶通过传感器数据输入(视觉/Lidar等)直接输出自车规划或控制信息,是目前智能驾驶最具代表性的方向。
去年我们推出了《首个面向工业级的端到端算法与实战教程》,今年很多小伙伴反馈技术发展太快了,先前的技术方案已经不适合当下的大环境。端到端目前发展出多个领域技术的方向,需要掌握多模态大模型、BEV感知、强化学习、视觉Transformer、扩散模型等相关的知识。学习端到端自动驾驶,是一个一站式强化多领域知识的好机会。但这样的学习路径往往非常痛苦。同时掌握多个领域的知识已经足够困难,而各领域的论文数量繁多、知识碎片化,入门者往往还没了解各个领域就已然放弃。如何从零散论文中提炼框架、掌握领域发展趋势,是初学者的常见挑战。同时学习目标驱动导航需要结合实际任务完成闭环,但缺乏系统的实战指导,难以从理论过渡到实践。另一方面,端到端自动驾驶的研究由于缺少高质量文档,提高了入门难度。
讲师介绍:Jason, C9本科+QS50 PhD,已发表CCF-A论文2篇,CCF-B论文若干。现任国内TOP主机厂算法专家,目前从事端到端、大模型、世界模型等前沿算法的预研和量产,并已主持和完成多项自动驾驶感知和端到端算法的产品量产交付,拥有丰富的端到端算法研发和实战经验。
课程大纲如下:
2)自动驾驶4D标注算法小班课
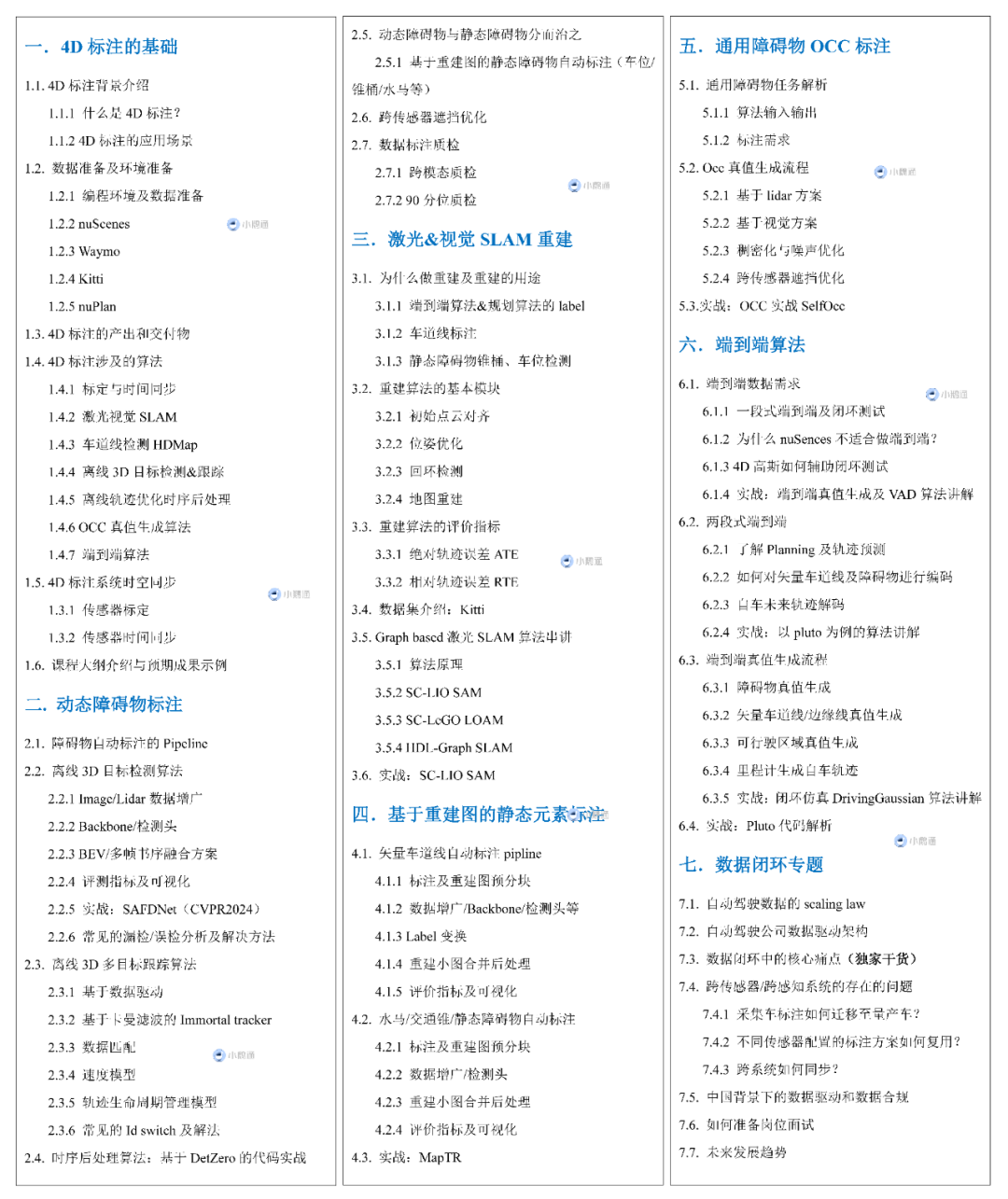
自动驾驶能力的背后是千万级训练数据赋予的强大动力,而这动力的源头就是数据闭环源源不断的自动化4D标注数据产出。随着端到端、VLA的大力铺开,训练所需要的数据形式也越来越复杂。不再是以往2D框、3D框、静态元素的单帧分别标注。端到端数据需要时间同步后的传感器统一标注动静态元素、OCC和轨迹等等,这样才能保证训练数据的完整性。面对越来越复杂的标注需求和训练数据需求,自动化4D自动标注的重要性日益凸显。
这些难点直接制约了数据闭环的迭代效率,成为提升自动驾驶系统泛化能力与安全性的关键瓶颈。很多小白根本不知道怎么入门,没有完整的学习体系,将会处处踩坑,久久不能入门,导致最终放弃学习,错失了机会。为此我们联合行业知名4D自动标注算法专家,出品了平台首门《自动驾驶4D自动标注算法就业小班课》教程。旨在解决大家入门难,优化进阶难的问题!什么有价值我们就教什么!
讲师介绍:Mark老师!c9院校硕士毕业,业内一线大厂数据闭环算法专家。从事自动驾驶感知算法多年,聚焦于多模态3D感知、数据闭环等方向。在4D自动标注算法开发、工程化落地上具有丰富经验。参与过多个量产交付项目,已发表多篇量产专利和专业论文。
课程大纲如下:
3)多模态大模型与自动驾驶实战课程
国内端到端的技术路线已经明确:端到端+大模型!今年以来,学术界在端到端自动驾驶领域上的大模型工作突然爆发,工业界相关融资的案例也如雨后春笋版快速崛起超越其它行业,相关的工作机会越来越多。某Boss招聘网站上,各大公司更是开出高薪挖人.....
大语言模型结合自动驾驶作为新兴技术领域,展现着巨大的潜力和影响。这种前沿技术对于快速学习和深入理解提出了挑战,自动驾驶之心前面已经推出了端到端实战课程,为此我们进一步打造了自动驾驶多模态大模型实战教程。
该课程旨在为大家提供一个系统化的学习平台,从通用多模态大模型,到大模型微调,最终在聚焦在端到端自动驾驶多模态大模型。这个课程的目的是帮助学习者更好地适应实际工作需要,为其进一步地发展和应用打下扎实的基础,课程大纲如下:

讲师介绍:Sora老师,业内一线大厂高级算法工程师。研究方向多模态大语言模型、Agent等,从事座舱大模型落地和端到端大模型落地工作。在算法设计、模型部署、工程化落地上具有丰富经验,参与过国内、国外多个车厂与车型的poc及sop交付量产项目。
4)自动驾驶感知系列
| BEV感知全栈系列教程 | 毫米波雷达视觉融合 | 激光雷达视觉融合 |
|---|---|---|
| 3D&4D毫米波雷达 | 面向量产的车道线检测 | Occupancy占用网络 |
| Occupancy数据生成 | 单目3D感知 | 点云3D目标检测 |
| Transformer与大模型 | YOLO系列全家桶 |
2)多传感器标定融合
| 面向工程和量产级的相机标定实战 | 多传感器标定全栈系统学习教程 |
|---|---|
| 多传感器融合跟踪全栈教程 |
5)模型部署
| CUDA与TensorRT部署实战教程 | BEV模型部署实战教程 |
|---|
4)自动驾驶规划控制与预测
| 规划控制理论&实战教程 | 轨迹预测理论与实战教程 |
|---|---|
| 自动驾驶规划控制小班课程 | 自动驾驶轨迹预测小班课程 |
6)自动驾驶仿真与开发
| Carla-Autoware联合仿真实战 | 面向自动驾驶量产的C++实战教程 |
|---|
7)端到端自动驾驶
| 端到端与VLA自动驾驶小班课 | 首个面向工业级的端到端算法与实战教程 | 端到端自动驾驶论文带读教程 |
|---|
8)大模型与自动驾驶
| 国内首个大模型与自动驾驶应用论文带读 | 世界模型与自动驾驶论文带读 |
|---|
9)科研辅导与其它
| 自动驾驶与CV领域通用论文辅导教程 | NeRF与自动驾驶论文带读教程 |
|---|
小班课也已经开始啦!
为了照顾有些同学需要更深入、更细节的内容输出,以及秋招、社招的求职需求。我们上半年筹备了几个小班课,真是干货满满!出发点就是实际工作用什么,我们就教什么;实际量产遇到什么痛点,我们就解决什么问题;实际面试什么是亮点,我们就分享什么!更细致点是解决以下问题:
课程的内容相对比较基础,自能不能再详细讲一讲规控目前研究的深水区内容?
有很多内容讲的不是很细,没有太明白,能不能陪伴式沟通啊?
有没有更面向量产的实战,实际公司都用的项目?
找工作没项目怎么办?导师不让我出去实习,简历上没有能打的项目。
有没有那种能够指导面试和修改简历的?
面试的时候不知道怎么突出自己,自动驾驶公司都要求啥?
......
也欢迎大家加入我们已筹备好的小班课程:规划控制方向、轨迹预测方向、感知全栈方向,再一起看看我们群内是怎么交流的吧!

聊聊我们是怎么学习和讨论交流的?
其实课程视频代码学习是一方面,我们更看重交流本身。每个课程都配有专属vip交流群,主讲老师每天群内会和大家交流,不定期线上直播答疑。主要解决几类关键问题:小白常踩的坑、工程上常遇到的问题、后续的研究方向等等;
这里也给大家展示下我们比较活跃的交流群,一览日常交流状态:








后面怎么找工作呢?
聊完课程学习,大家最关注的莫过于如何找到理想的工作。其实我们从一开始就不仅仅关注技术学习本身,在早期的时候就对接了很多自动驾驶公司,也结识了很多自动驾驶公司的算法主管、HR等。所以我们能第一时间接触到各家公司的需求,这也给我们的很多同学提供了岗位。
目前我们对接的公司和机构主要包括理想、地平线、百度、上海人工智能实验室、蔚来汽车、小鹏汽车、华为车BU、大疆等。课程学员在完成课程学习之后,可以联系我们进行岗位推荐,我们将第一时间递交给对应算法开发负责人,绕开官网投递。
也欢迎大家加入我们的【自动驾驶之心知识星球】和【AutoRobo求职星球】,第一时间获取最新岗位和技术。

开学季大优惠!!!
已经进入到下半年了,也是找工作和求职比较密集的时间点。欢迎加入自动驾驶大家庭一起进步,切勿独自踩坑!欢迎添加小助理咨询开学季活动~




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









