



作者 | 深蓝学院 来源 | 深蓝AI
点击下方卡片,关注“自动驾驶之心”公众号

>>自动驾驶前沿信息获取→自动驾驶之心知识星球
本文只做学术分享,如有侵权,联系删文
作为机器人与无人机领域的杰出学者,高飞老师始终站在研究的最前沿。
高飞:国家优青。浙江大学控制学院长聘副教授,研究员,博士生导师。主要研究方向:空中机器人、轨迹规划、自主导航、集群协同、定位感知。近年来,以第一作者/通讯作者身份在知名机器人期刊、会议发表论文70余篇;获IEEE TRO 2020年最佳论文荣誉提名奖、国际基础科学大会ICBS 2024前沿科学奖、IEEE ICRA 2024年最佳论文提名等学术荣誉;入选爱思唯尔数据库2023/24年度全球前2%顶尖科学家。
实验室官网:http://zju-fast.com/research-group/fei-gao/
2025上半年,他再次展现了其卓越的学术洞察力与创新能力,在无人机集群规划、高机动性运动控制、SLAM以及机器人学核心理论等多个关键方向上,取得了一系列引人瞩目的突破性成果。
这些研究成果不仅深刻推动了相关技术的发展边界,更为解决现实世界中的复杂问题提供了坚实的理论基石与前沿的解决方案。
本文将精选并解读其团队在本年度上半年发表的6篇重磅论文,旨在为读者呈现一场关于未来机器人技术的思想盛宴,一窥其最新的研究图景。
1
—
上半年发表的6篇重磅论文
FIRI: Fast Iterative Region Inflation for Computing Large 2-D/3-D Convex Regions of Obstacle-Free Space
发表期刊:IEEE Transactions on Robotics
机构:浙江大学
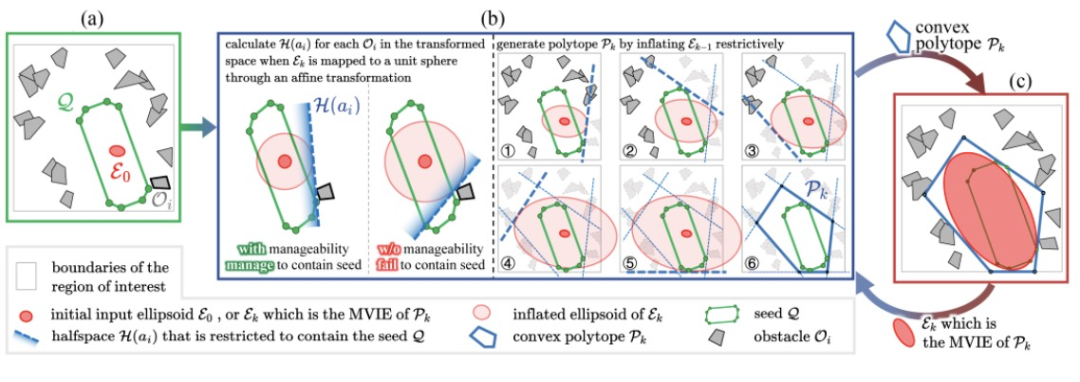
推荐理由:提出了一种名为FIRI的新型凸多胞体生成算法,首次同时实现了高质量(体积大)、高效率(速度快)和强可控性(能包含指定种子点集)三大目标。
论文内容:作者提出了一种快速迭代区域膨胀算法(FIRI),用于在充满障碍物的环境中高效计算大型的无障碍凸多胞体。 该算法通过迭代执行两个核心模块来工作:约束性膨胀(RsI)和最大体积内接椭球(MVIE)计算。RsI模块通过引入特定约束,确保最终生成的凸区域必须包含用户预设的“种子”(例如,机器人的完整模型或规划好的一段路径),这保证了算法在实际应用中的“可控性”。
同时,MVIE模块通过迭代优化,不断找到当前凸区域内体积最大的椭球作为下一步膨胀的基础,从而保证了生成区域的“高质量”。 为了提升“高效率”,作者针对这两个模块的计算特性设计了专门的求解方法,包括为MVIE问题提出了更高效的二阶锥规划(SOCP)公式,并且首次为二维场景下的MVIE计算问题设计了具有线性时间复杂度的解析算法。大量的实验和真实场景应用(包括二维车辆和三维无人机规划)证明,FIRI在性能上全面超越了现有的其他主流方法。
论文主页:https://doi.org/10.1109/TRO.2025.3562482
CoNi-OA:Global-State-FreeObstacle Avoidance for Quadrotor Control in Air-Ground Cooperation
发表期刊:IEEE Robotics and Automation Letters
机构:浙江大学、上海市特种设备监督检验技术研究院
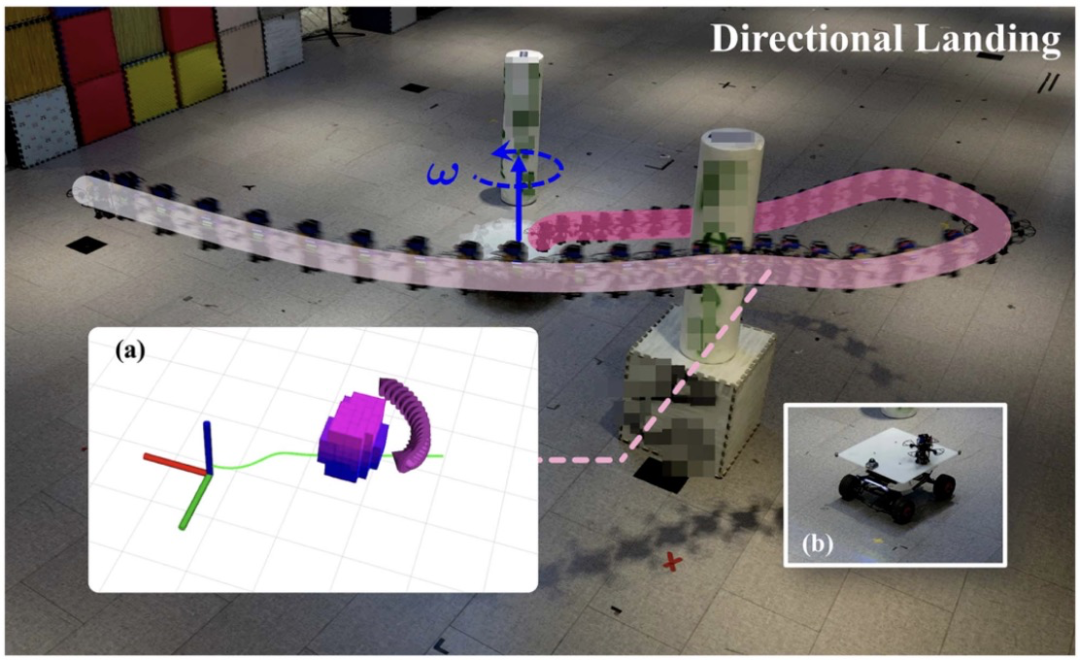
推荐理由:首次提出了一种无需全局定位(如GPS或SLAM)的空地协同避障框架。该方法让无人机在地面车的非惯性坐标系下,仅凭单帧原始激光雷达数据就能实时、快速地(<5ms)调整自身速度以躲避障碍,能有效应对环境中不可预测的动态障碍物。
论文内容:针对现有空地协同框架CoNi-MPC中无人机缺乏避障能力的问题,作者提出了CoNi-OA算法。该算法的核心思想是,在地面无人车(UGV)的非惯性坐标系中直接控制无人机(UAV),从而摆脱对全局状态估计的依赖。它通过无人机搭载的激光雷达实时感知环境,但无需对障碍物进行建模或运动预测。
算法利用采集到的单帧点云数据,直接计算出一个“调制矩阵”,该矩阵能实时修正无人机预设的飞行速度,生成一条无碰撞的局部轨迹。由于计算速度极快,该方法能够让无人机在跟随UGV执行任务(如伴飞、环绕、降落)的同时,有效规避因UGV运动而显得“动态变化”的静态或动态障碍物,极大地扩展了空地协同系统的应用场景,尤其适用于无特征或未知环境。
论文主页:
https://doi.org/10.1109/LRA.2025.3568314
Primitive-Swarm: An Ultra-Lightweight and Scalable Planner for Large-Scale Aerial Swarms
发表期刊:IEEE Transactions on Robotics
机构:复旦大学、浙江大学、北京航空航天大学
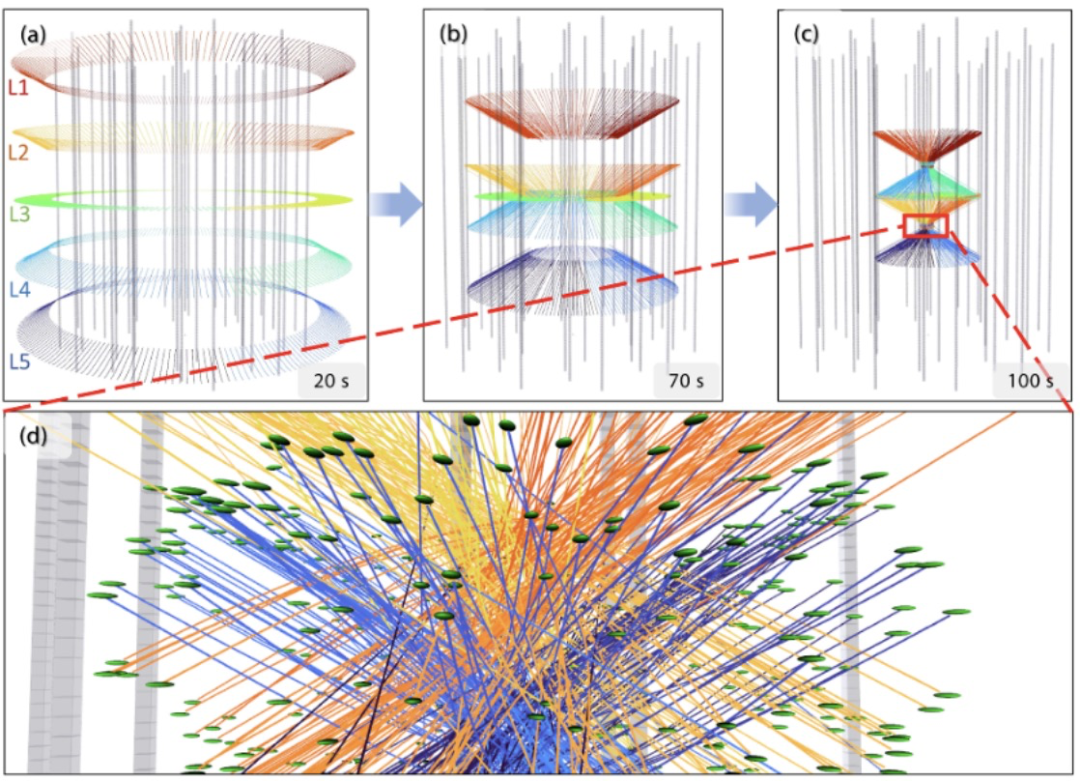
推荐理由:通过离线构建时间最优的运动基元库,将复杂的在线轨迹优化问题转化为一个超轻量级的在线选择问题,从而实现了前所未有的大规模(高达1000架)无人机集群的实时、可扩展规划。
论文内容:为了解决大规模无人机集群规划中计算效率与可扩展性之间的矛盾,作者提出了一个名为Primitive-Swarm的超轻量级规划器。该方法采用去中心化、异步的规划策略。其核心是一个创新的“运动基元库”,这个库包含了大量预先离线计算好的、满足动力学约束且时间最优的短轨迹。同时,算法离线建立了一个快速碰撞检测机制,将这些运动基元与离散化的空间网格进行关联。
在飞行中,每个无人机只需根据传感器数据和收到的其他无人机轨迹,通过查表快速标记出库中不可用的“不安全”基元,然后从剩余的安全基元中选择一个成本最低的来执行。这种将耗时的优化过程转变为简单的选择过程的策略,使得在线规划的计算时间低于1毫秒,并成功在仿真中实现了高达1000架无人机在未知复杂环境中的实时自主飞行。
论文主页:
https://doi.org/10.1109/TRO.2025.3573667
项目主页:https://github.com/ZJU-FAST-Lab/Primitive-Planner
Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution
发表期刊
: Science Robotics机构:浙江大学、微分智飞科技有限公司
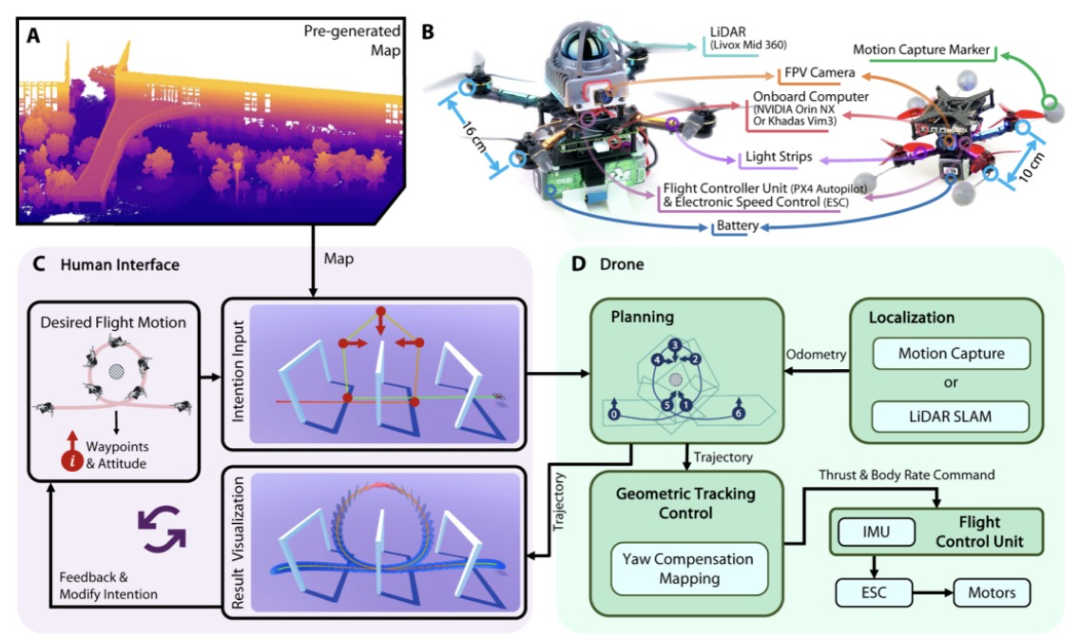
推荐理由:首次提出了一个完整的系统框架,让无人机能够自主生成并执行媲美顶尖人类飞手的高难度、任意组合的特技飞行动作,并成功在密集的障碍物环境中稳定执行。
论文内容:为了让无人机能够像专业飞手一样完成复杂的特技飞行,作者提出了一个集生成与执行于一体的自主飞行系统。该系统首先引入了一种通用的特技飞行表征方法,允许用户通过一系列离散的“特技意图”(即关键的拓扑路径点和姿态变化)来轻松描述任意复杂的飞行动作。接着,一个时空联合优化的轨迹规划器会自动将这些意图转化为一条平滑、无碰撞且动力学可行的轨迹。
特别地,论文深入研究并解决了特技飞行中因“微分平坦奇点”导致的偏航敏感性问题,提出了一种偏航补偿策略,确保了无人机在进行翻转等极限动作时的稳定性。大量的仿真和真实实验证明,该系统能让无人机安全、可靠地完成以往只有专业飞手才能实现的复杂花式飞行。
论文主页:https://doi.org/10.1126/scirobotics.adp9905
项目主页:https://github.com/ZJU-FAST-Lab/Aerobatic-Planner
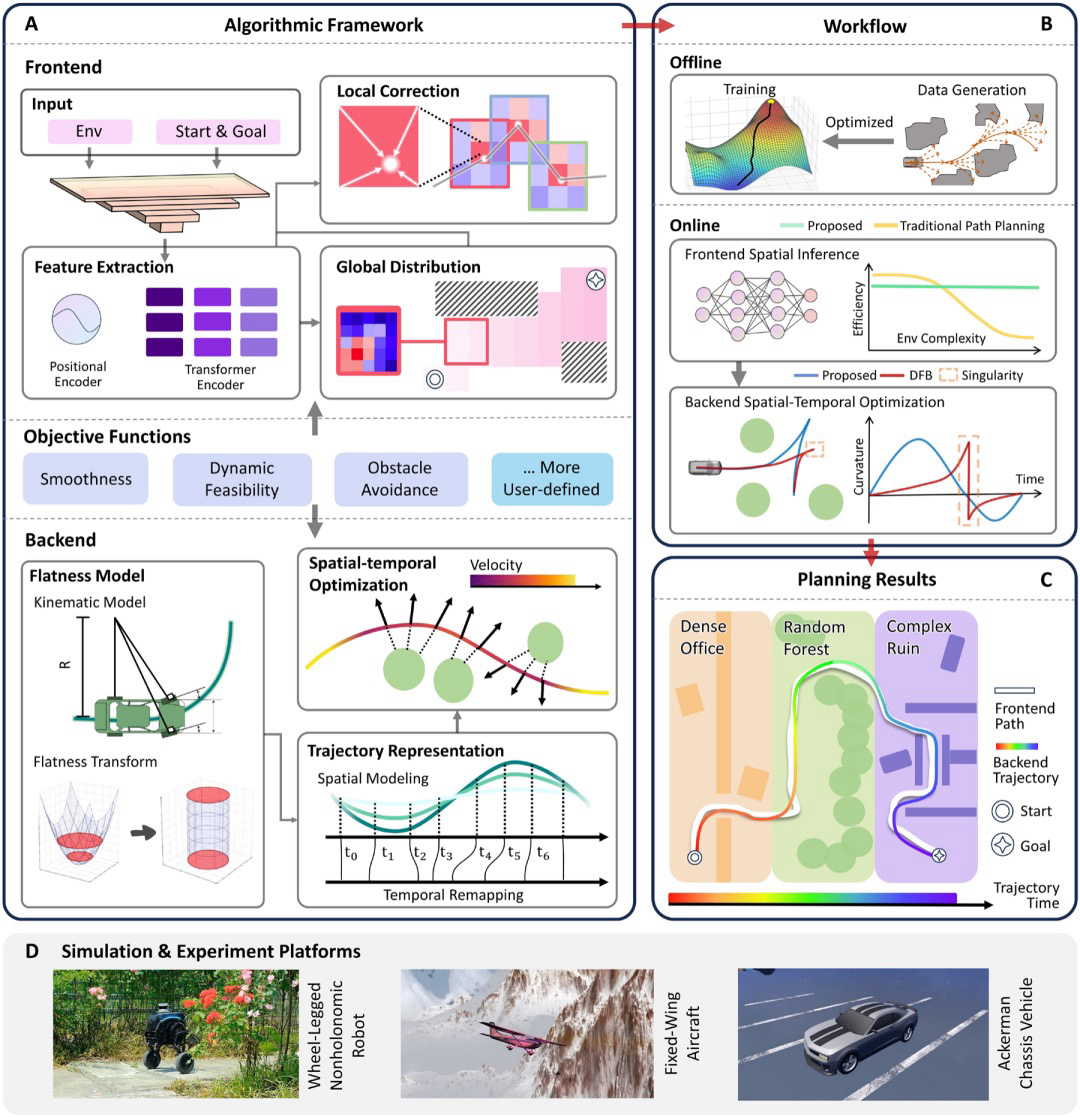
Hierarchically depicting vehicle trajectory with stability in complex environments
发表期刊:Science Robotics
机构:浙江大学
推荐理由:提出了一种创新的“学习+优化”分层规划框架。前端通过神经网络模仿人类的直觉路径规划,实现了在复杂环境中计算时间的稳定,不受环境复杂度影响;后端独创了一种双层多项式轨迹表示法,从根本上解决了基于微分平坦的轨迹优化中存在的奇异点问题,确保了在复杂机动(如倒车)中轨迹的数值稳定性和高质量。
论文内容:作者提出了一种分层运动规划器,旨在解决机器人在复杂环境中导航的难题。该规划器分为两部分:前端是一个神经网络,它学习人类的直-觉路径规划能力,能够直接从全局环境信息中“描绘”出一条合理的初始路径,其推理时间几乎不受环境复杂度的影响,保证了规划的实时性和稳定性。
后端是一个强大的时空轨迹优化器,它接收前端的粗略路径并将其精化为平滑、安全且满足机器人高阶运动学约束的最终轨迹。特别地,后端采用了一种创新的“双层多项式”轨迹表示方法,巧妙地利用微分平坦来提高效率,同时从根本上消除了传统方法在处理零速或倒车等情况时遇到的数值奇异点问题,从而显著提升了算法的鲁棒性和收敛性。
论文主页:https://doi.org/10.1126/scirobotics.ads4551
项目主页:https://github.com/ZJU-FAST-Lab/DPtraj
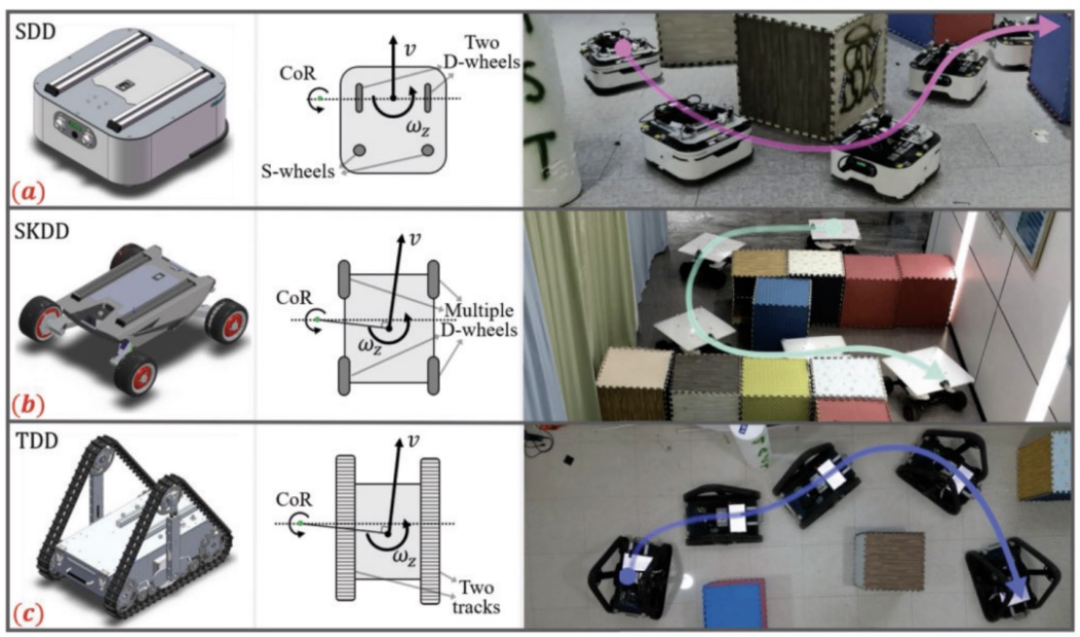
Universal Trajectory Optimization Framework for Differential Drive Robot Class
发表期刊:IEEE Transactions on Automation Science and Engineering
机构:浙江大学、浙江中烟工业有限责任公司
推荐理由:提出了一种适用于各类差速驱动机器人(两轮、滑移、履带式)的通用轨迹优化框架。其核心创新在于提出了一种基于运动状态(如线速度、角速度)而非位置的轨迹表示方法,该方法天然地满足了机器人的非完整性约束,能统一处理前进、后退及侧滑等复杂运动,并保证了计算的高效性。
论文内容:针对不同类型的差速驱动机器人在运动规划上面临的通用性、轨迹质量和计算效率难以兼-顾的问题,作者提出了一个通用的轨迹优化框架。该框架的核心是一种新颖的“运动状态(Motion State, MS)轨迹”表示法。它不直接对机器人的笛卡尔坐标(x,y)进行参数化,而是直接用多项式来参数化机器人的线速度和角速度等运动状态。
这种方法使得轨迹天然地满足了机器人的非完整性约束,并且通过对运动状态的积分来恢复位置,从而避免了基于微分平坦方法在低速或转向时遇到的奇异点问题,同时还能对滑移转向或履带式机器人的侧滑进行建模。基于此,作者构建了一个完整的规划与控制系统,并通过在三种不同差速平台上的大量仿真与真实世界实验,验证了该框架能够高效、鲁棒地生成高质量平滑轨迹。
论文主页:https://doi.org/10.1109/TASE.2025.3550676
项目主页:https://zju-fast-lab.github.io/DDR-opt
2
—
结语
纵观2025年上半年的这六篇代表性工作,我们不难发现一条清晰的主线贯穿其中,即对机器人自主运动能力的系统性思考与极致追求。从底层的凸空间构建到上层的直觉式路径规划,从单体的极限特技飞行到千机规模的智能集群协作,再到跨越空地平台的通用优化框架,高飞教授的研究不仅在广度上覆盖了机器人学的多个核心领域,更在深度上不断挑战着性能的极限。每一项研究都直面了领域内的核心难题,并以兼具理论深度与工程价值的方案给出了优雅的解答。
这些成果不仅是当下的技术高峰,更为未来机器人在更广阔、更复杂的真实世界中可靠应用铺平了道路。我们有理由相信,在高飞教授的持续探索与引领下,一个更加智能、敏捷、高效的机器人时代正加速到来。让我们共同期待他为我们揭示更多关于机器人未来的无限可能。
自动驾驶之心
论文辅导来啦

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 5101
5101

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









