



点击下方卡片,关注“自动驾驶之心”公众号
南开提出AD-GS
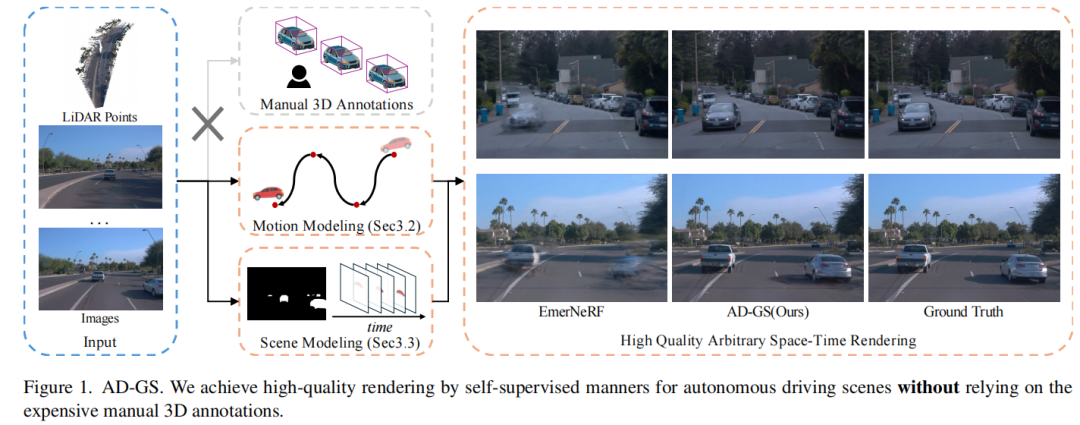
自监督自动驾驶高质量闭环仿真,PSNR暴涨2个点(ICCV'25)
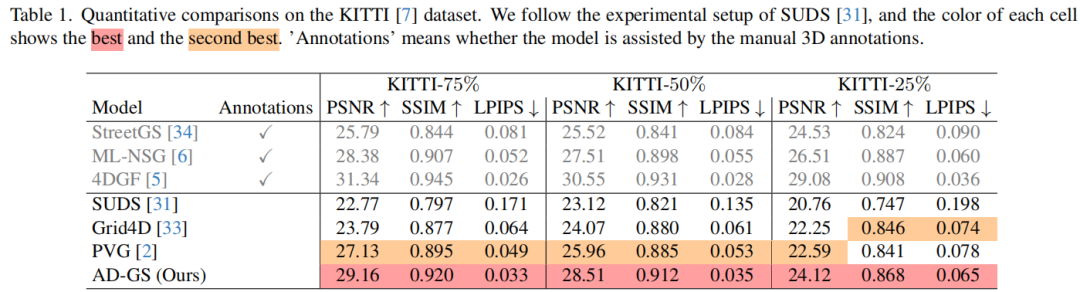
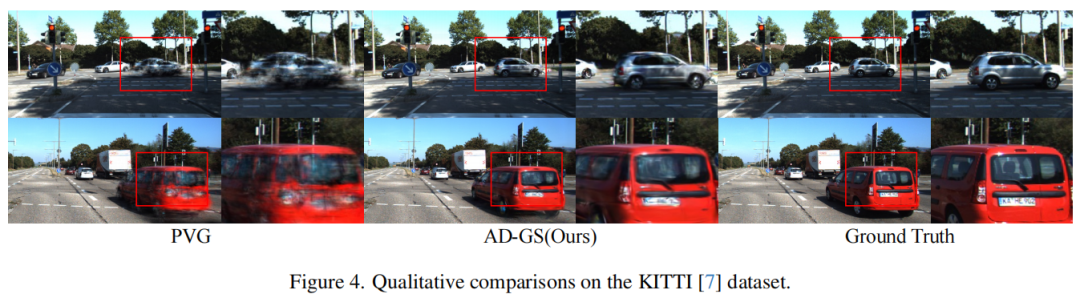
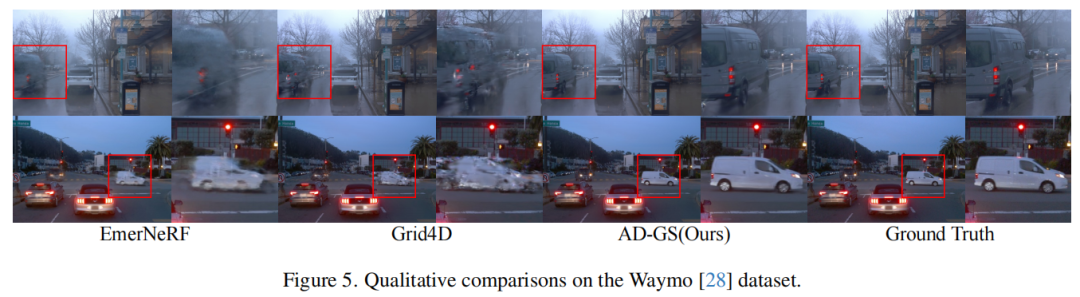
南开、伊利诺伊大学厄巴纳-香槟分校和南京大学的研究团队ICCV'25中稿的工作,本文提出了 AD-GS 框架,通过结合可学习 B 样条曲线与三角函数的运动建模和对象感知分割,实现了自监督自动驾驶场景的高质量渲染,在 KITTI 数据集上将 PSNR 提升至 29.16(75% 训练数据设置),显著优于现有自监督方法(如 PVG 的 27.13)。
论文标题:AD-GS: Object-Aware B-Spline Gaussian Splatting for Self-Supervised Autonomous Driving
论文链接:https://arxiv.org/abs/2507.12137
项目主页:https://jiaweixu8.github.io/AD-GS-web/
主要贡献:
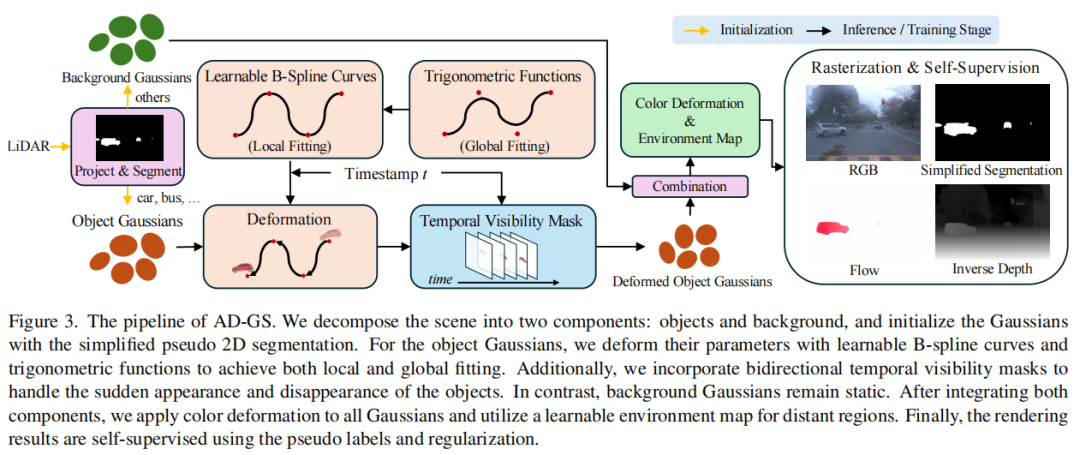
提出一种新颖的运动建模方法,结合可学习 B 样条曲线、B 样条四元数曲线与三角函数,实现动态高斯的局部和全局拟合。
提出基于简化伪 2D 分割的场景建模方法,将场景分为物体和背景,物体采用动态高斯和双向时间可见性掩码重建,提升噪声伪标签下的鲁棒性。
设计可见性和物理刚性正则化,结合自监督机制,避免模型出现混乱行为,提升性能。
算法框架:
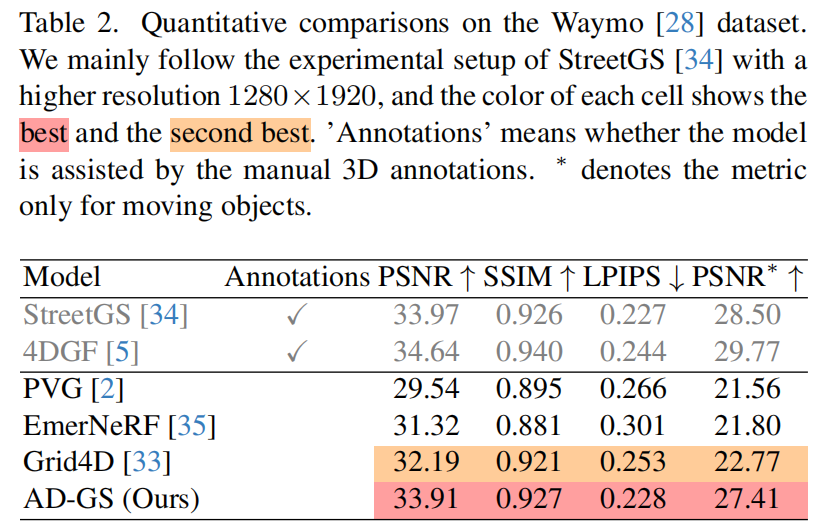
实验结果:
可视化:
Foresight in Motion:基于奖励启发式的轨迹预测强化框架
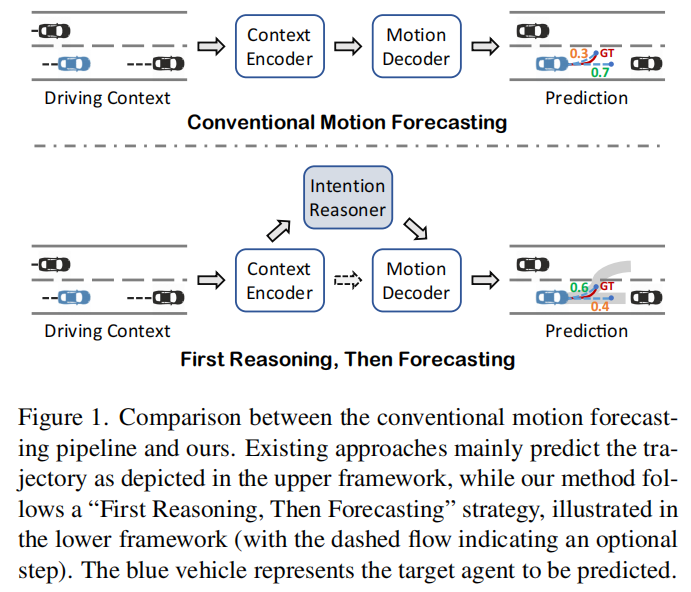
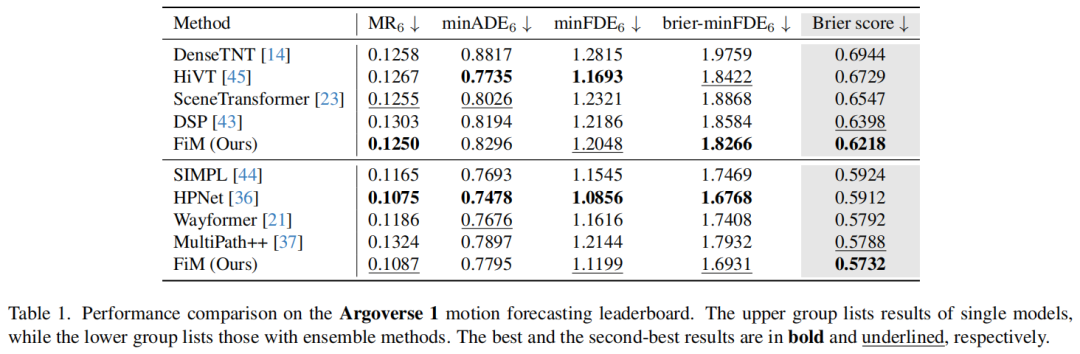
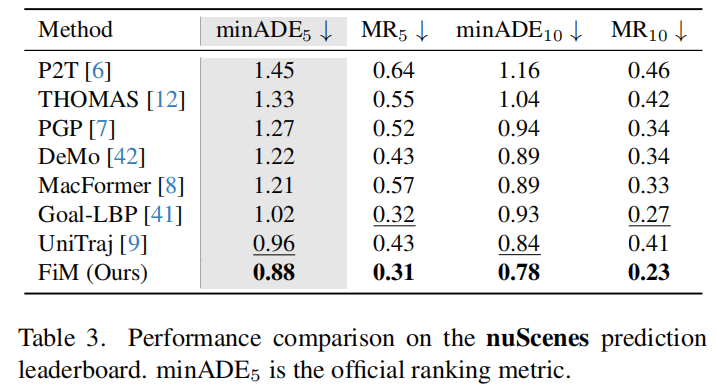
香港科技大学、滴滴 Voyager Research 等单位ICCV'25中稿的工作,本文提出轨迹预测新框架 FiM,通过奖励驱动的意图推理(QIRL)和双向选择性状态空间模型(Bi-Mamba),在 Argoverse 1 数据集上实现 Brier Score 0.6218(单模型最优),nuScenes 数据集上 minADE₆ 0.88(当前榜单第一)。
论文标题:Foresight in Motion: Reinforcing Trajectory Prediction with Reward Heuristics
论文链接:https://arxiv.org/abs/2507.12083
主要贡献:
提出 “先推理后预测(First Reasoning, Then Forecasting)” 策略,从规划视角重新定义轨迹预测任务,将行为意图作为空间引导融入预测过程。
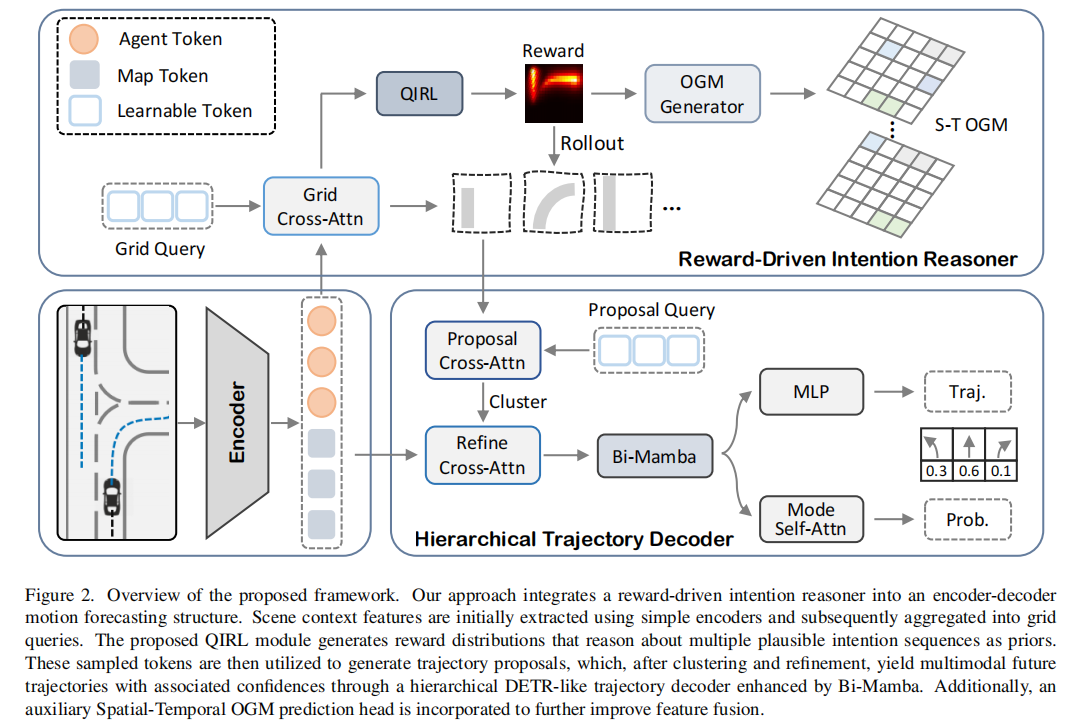
设计基于奖励驱动的意图推理器,构建查询中心的逆强化学习(QIRL)框架,融合最大熵逆强化学习(MaxEnt IRL)与向量化上下文表示,有效提取意图先验。
开发结合双向选择性状态空间模型(Bi-Mamba)的分层 DETR-like 解码器,提升轨迹预测的准确性与置信度。
在 Argoverse 和 nuScenes 大规模数据集上验证了方法的优越性,显著提升预测置信度,性能优于现有主流方法。
算法框架:
实验结果:
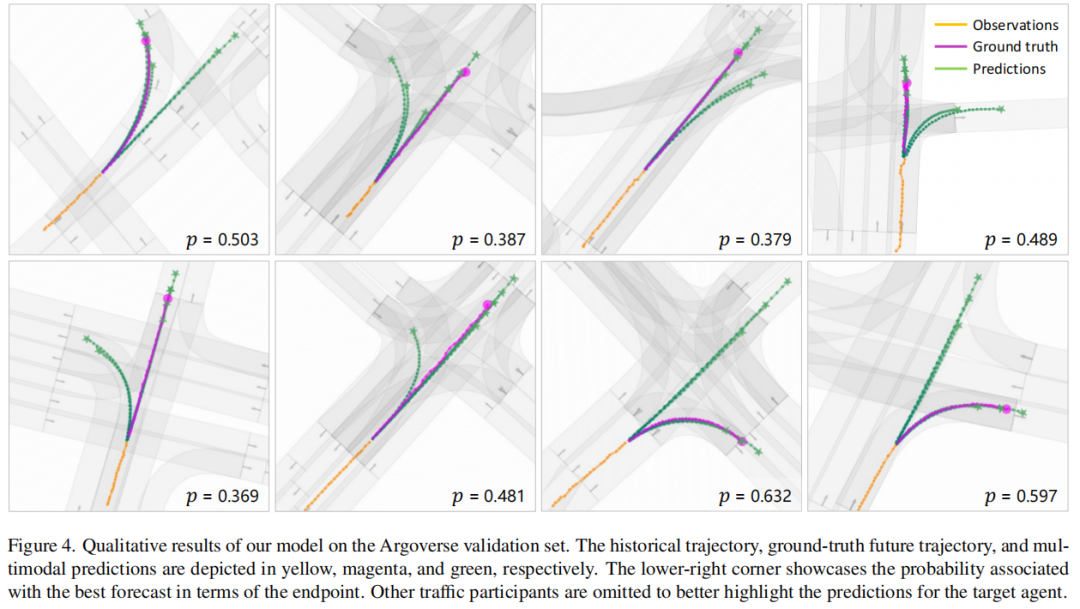
可视化:
IANN-MPPI:面向自动驾驶的交互感知神经网络增强型模型预测路径积分方法
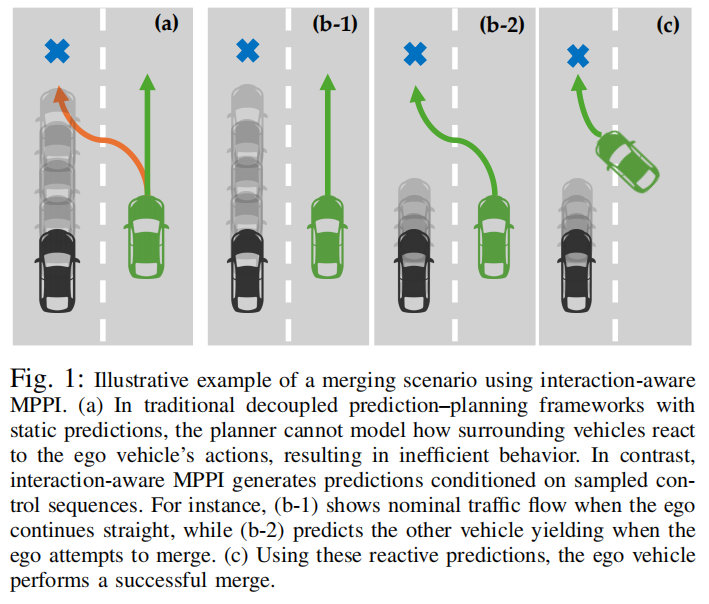
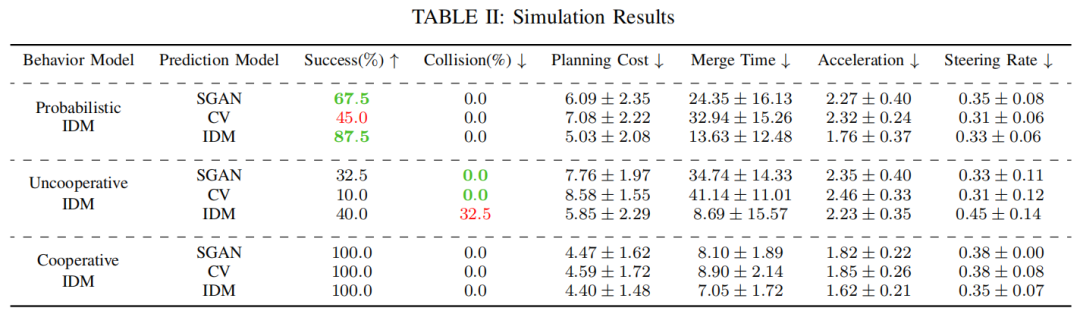
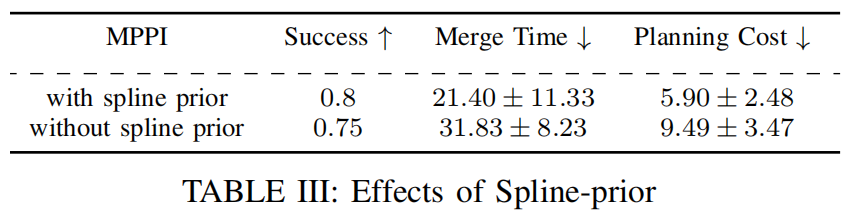
本田研究所联合加州大学伯克利分校、伊利诺伊大学厄巴纳-香槟分校,提出交互感知神经网络增强的模型预测路径积分框架(IANN-MPPI),在密集车流汇入场景中成功率提升至67.5%(较非交互基线高22.5%),变道时间缩短10秒(31.83秒→21.40秒),计算耗时0.1秒满足实时性。
论文标题:IANN-MPPI: Interaction-Aware Neural Network-Enhanced Model Predictive Path Integral Approach for Autonomous Driving
论文链接:https://arxiv.org/abs/2507.11940
主要贡献:****
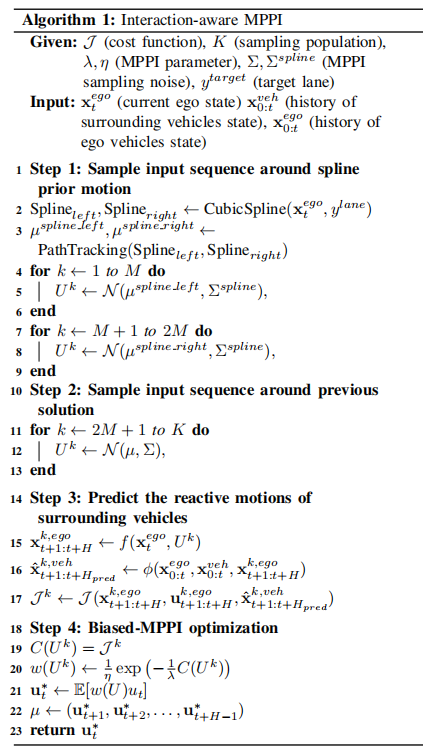
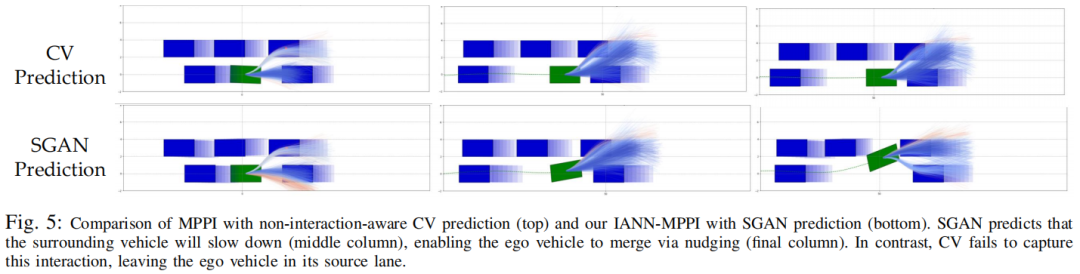
提出了交互感知神经网络增强模型预测路径积分(IANN-MPPI)控制框架,这是一种实时、可完全并行的交互感知轨迹规划方法,通过基于 MPPI 采样的每个控制序列预测周围智能体的反应行为,实现复杂机动。
为 MPPI 采样分布引入基于样条的先验,以增强在结构化车道环境中的性能,促进高效的车道变换行为,解决了标准 MPPI 采样多样性不足的问题。
算法框架:
实验结果:
可视化:
最后欢迎大家加入知识星球,硬核资料在星球置顶:加入后可以获取自动驾驶视频课程、硬件及代码学习资料。业内最全的全栈学习路线图,独家业内招聘信息分享~

我们目标是未来3年内打造一个万人聚集的智能驾驶&具身智能社区,这里也非常欢迎优秀的同学加入我们(目前已经有华为天才少年、自驾领域研究前沿的多为大佬加入)。我们和多家业内公司搭建了学术 + 产品+ 招聘完整的桥梁和链路,同时内部在教研板块也基本形成了闭环(课程 + 硬件+问答)。社区里面既能看到最新的行业技术动态、技术分享,也有非常多的技术讨论、入门问答,以及必不可少的行业动态及求职分享。具身智能这么火,要不要考虑转行?自动驾驶技术的未来发展趋势如何?大模型如何预自动驾驶&具身智能结合?这些都是我们持续关注的
加入后如果不满意,三天内(72h)可全额退款!三周年了,我们为大家准备了大额优惠券~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









