




点击下方卡片,关注“自动驾驶之心”公众号
今天自动驾驶之心为大家分享吉林大学最新的工作!DiffE2E:用扩散模型重塑端到端自动驾驶!如果您有相关工作需要分享,请在文末联系我们!
自动驾驶课程学习与技术交流群事宜,也欢迎添加小助理微信AIDriver004做进一步咨询
>>点击进入→自动驾驶之心『扩散模型』技术交流群
论文作者 | Rui Zhao等
编辑 | 自动驾驶之心
写在前面 && 笔者理解
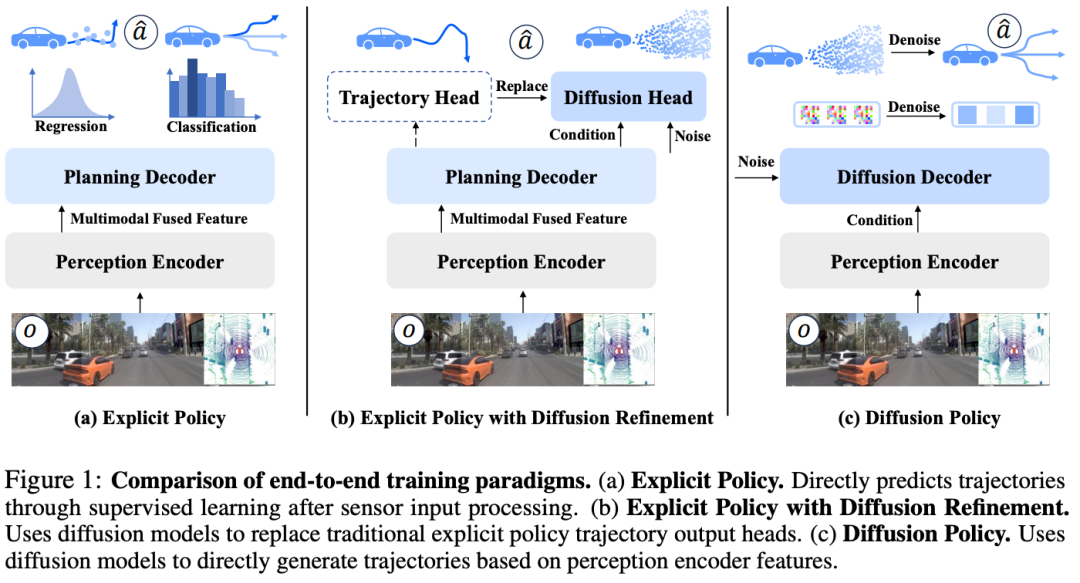
为了避免感知、预测、规控各个模块之间的信息传递损失,端到端可谓是当下自动驾驶领域最主流的技术方向,没有之一。现在主流玩法是用显式监督学习,直接从海量驾驶数据里学怎么把环境信息变成方向盘和油门控制。不过这路子也有两个较大的硬伤:开车本来就有多种可能性(比如遇到障碍可以绕左或绕右),但监督学习只会学个"平均动作",结果经常整出别扭操作;而且遇到训练数据里没见过的奇葩路况,模型就直接懵了。
论文链接:https://arxiv.org/pdf/2505.19516
设想一下,遇到一个十字路口,老司机可能有五六个合理选择,而现在的AI只会选个相对比较折中方案。为了解决这个问题,最近也有人用离散轨迹集合来应对多模态问题,但这种硬编码的方式就像把活人手脚绑住,把灵活的决策变成固定选项选择题,遇到突发状况就抓瞎。这时候扩散模型(Diffusion Models)就可以大展身手了!这项技术其实在AI作画圈已经封神,靠"先加噪再去噪"的套路能生成千变万化的图片。机器人运动规划领域也验证了它能搞定复杂动作序列。但自动驾驶任务要更为困难——既要实时响应,又要确保轨迹符合交规,还得躲开乱窜的行人和车流。
所以,最近有些团队试水用扩散模型做路径规划和端到端控制,用了DDIM、DPM-Solver这些加速技术,效果确实惊艳。不过现在多数方法只是把扩散模型当"后处理插件"(如图1(b)),在传统规划模块后面加个扩散优化。这相当于戴着镣铐跳舞——既丢了原始感知数据的细节,又被前面的模块限制发挥。
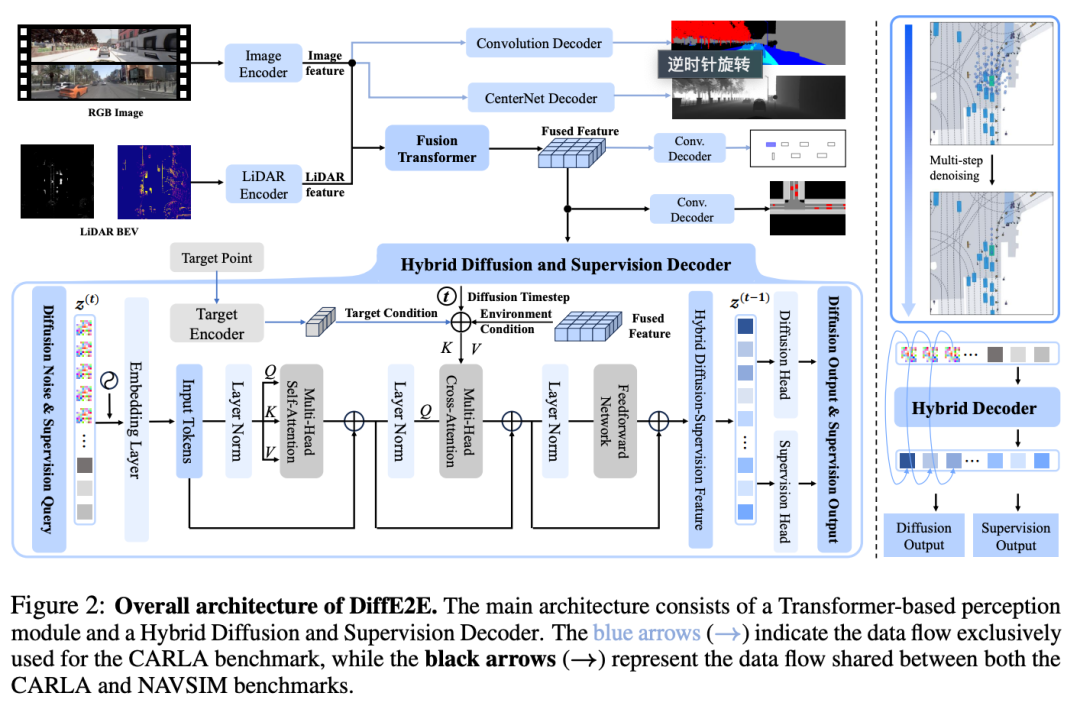
基于这样的背景之下,作者提出了一个新的方案—— DiffE2E 框架(如图2所示)。首先用双向跨注意力让激光雷达和摄像头的数据对齐,把不同传感器的信息融合到一起。然后送进Transformer架构的混合解码器,让扩散模型和传统监督学习组队打配合:扩散模型负责天马行空地想象各种可能轨迹,监督学习则盯紧车速、周围车辆动态这些硬指标。这俩通过跨注意力机制实时交换信息,最后生成既灵活又靠谱的驾驶方案。
相关研究
端到端自动驾驶
端到端自动驾驶近年来在跨模态感知融合与决策规划方面突飞猛进。UniAD 构建了全栈Transformer架构,将感知-预测-规划任务统一编排;VAD 提出矢量化场景表征提升规划效率;VADv2 通过轨迹词库建模动作空间分布;SparseDrive 提出稀疏轨迹表征实现无BEV的高效驾驶;Hydra-MDP 系列设计多教师蒸馏框架,将规则系统与人类驾驶知识相融合。Transfuser 通过 Transformer 融合相机与激光雷达特征应对路口决策;TCP 联合训练轨迹与控制预测;InterFuser 引入安全思维图谱实现多视角跨模态融合;TF++ 则通过解码器增强与解耦速度预测提升性能。不过这些显式监督方法常将多模态驾驶行为压缩为单一确定性输出,在多选择场景中容易产生"平均化"决策。虽然在特定场景表现亮眼,但面对超出训练数据的复杂路况时泛化能力明显受限。
扩散模型在交通与自动驾驶中的应用
扩散模型正以强大的多模态生成能力应用于自动驾驶。Diffusion-ES 创新地将进化策略与扩散模型结合,在nuPlan基准测试中零样本性能碾压传统方法;VBD 用博弈论指导对抗场景生成,提升仿真真实性;MotionDiffuser 提出置换不变架构实现约束条件下的多智能体轨迹采样,保证交互一致性;Diffusion Planner 利用 DPM-Solver 和分类器引导,实现闭环规划中快速、安全、个性化的轨迹生成。不过这些方法多基于完美感知假设,忽视了实际应用中感知不确定性带来的状态估计误差。
在端到端自动驾驶领域,扩散模型的应用已崭露头角:DiffusionDrive 首次将扩散模型引入端到端驾驶,采用锚点策略平衡实时性与多样性;HE-Drive 通过条件 DDPM 和视觉语言模型打分,生成拟人化的时空一致轨迹;GoalFlow 用目标驱动的流匹配解决轨迹发散问题,实现高效一步生成。这些工作体现出了扩散模型在该领域的巨大潜力,但现有方法在感知-规划协同优化、实时性保障等方面仍有提升空间。
预备知识
问题定义:这篇论文聚焦于基于扩散模型的端到端自动驾驶闭环控制策略。系统直接以多模态原始感知数据作为输入,包括前视摄像头RGB图像 、激光雷达点云 及车辆状态信息 。系统输出自车未来轨迹 ,其完整采样分布表示为:
在扩散建模中, 表示扩散过程第 步的中间变量,最终预测轨迹为 ,其中每个路径点 表示预测轨迹中的位置信息。条件信息 通过跨模态特征融合模块从多模态传感器数据编码获得。与传统开环控制不同,闭环控制中当前时刻的轨迹决策直接影响下一时刻的感知输入,形成动态反馈回路。这种耦合关系要求模型具备强大的时序一致性与鲁棒性。
扩散模型:去噪扩散概率模型(DDPM)通过两阶段过程捕捉复杂多模态分布:前向扩散逐步加噪,逆向过程通过迭代去噪重建数据。前向过程遵循马尔可夫链,将数据 经 步转化为噪声:
其中 控制噪声水平。通过重参数化技巧可直接采样 :
式中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1785
1785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









