



>>直播和内容获取转到→自动驾驶之心知识星球
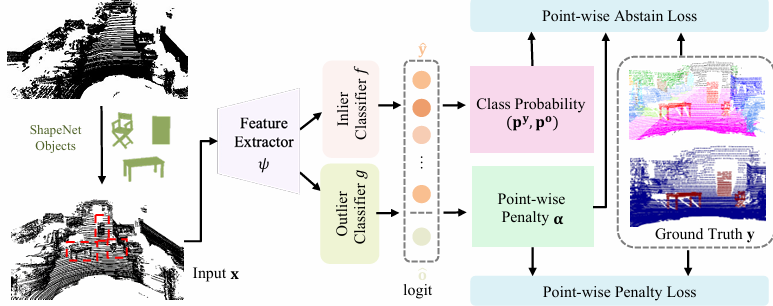
本文是清华大学、厦门大学、滴滴出行、香港中文大学(深圳)合作完成的发表于 AAAI 2025 的研究成果《LiON: Learning Point-wise Abstaining Penalty for LiDAR Outlier DetectioN Using Diverse Synthetic Data》。该研究从选择性分类角度重新审视激光雷达异常点检测问题,提出一种新的学习范式和异常点合成管道。通过学习逐点弃权惩罚来校准内点和异常点分类器关系,并利用 ShapeNet 数据集合成多样化异常点,解决了激光雷达点云语义信息缺乏及现有合成方法无法代表真实异常点长尾分布等问题,在 SemanticKITTI 和 nuScenes 数据集上取得了 SOTA 性能,有效提升了异常点检测效果。
论文地址:https://arxiv.org/abs/2309.10230
项目仓库:https://github.com/Daniellli/LiON
今天自动驾驶之心深感荣幸,邀请到了文章的一作,智源研究院算法工程师—许少聪 ,为大家详细解读这篇发表于 AAAI 2025 的杰出成果 LiON。视频录播会在第一时间上传至『自动驾驶之心知识星球』

国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

【自动驾驶之心】技术交流群
自动驾驶之心是国内领先的技术交流平台,关注自动驾驶前沿技术与行业、职场成长等。我们成立了一系列的技术交流群,涉及:语义分割、车道线检测、2D/3D目标跟踪、2D/3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、在线地图、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、Gaussian Splatting、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等多个方向!
备注:学校/公司+方向+昵称(快速入群方式)

点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









