



编辑 | 自动驾驶小白说
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
文:https://arxiv.org/pdf/2501.02530
代码:https://github.com/henryhcliu/udmc_carla.git
1. 摘要
当前的自动驾驶系统常常在确保安全和遵守交通规则的同时,难以平衡决策制定和运动控制,特别是在复杂的城市环境中。现有方法由于分别处理这些功能,可能导致效率低下和安全妥协。为应对这些挑战,我们引入了UDMC,这是一个可解释且统一的4级自动驾驶框架。UDMC将决策制定和运动控制整合为一个单一的最优控制问题(OCP),考虑了与周围车辆、行人、车道和交通信号的动态交互。通过采用创新的势能函数来模拟交通参与者和规定,并结合专门的运动预测模块,我们的框架增强了道路安全性和规则遵守性。集成设计允许实时执行适合各种驾驶场景的灵活操作。在CARLA中进行的高保真模拟展示了该框架的计算效率、鲁棒性和安全性,与各种基线模型相比,驾驶性能更优。
2 创新点
本工作提出一个名为UDMC的全面框架,它整合了通过APF进行的交通对象特征提取,以及通过IGPR对交通参与者进行的运动预测。碰撞避免和遵守交通规则被制定为OCP中的软约束,配有精心设计的PFs。我们的方法同时实现了高层决策和低层控制,从而为城市驾驶提供了一个计算效率高的流程。我们将在四个具有挑战性的城市驾驶场景中,将所提出的方法与基于规则的方法以及名为InterFuser的学习型方法进行比较。同时,也进行了一系列的消融模拟和基准评估。结果清楚地展示了UDMC所获得的驾驶行为的有效性、鲁棒性和安全性,同时也实现了高成功率和稳定的通勤时间表现。由于我们的工作提供了一个通用的自动驾驶框架,这个框架中的不同模块可以根据特定的驾驶应用进行适当修改,这得益于该框架的兼容性和通用性。作为我们未来工作的一部分,UDMC可以在没有大量适配工作的前提下,部署在配置较低的工业计算机设备上。
3. UDMC框架概述
3.1 框架结构
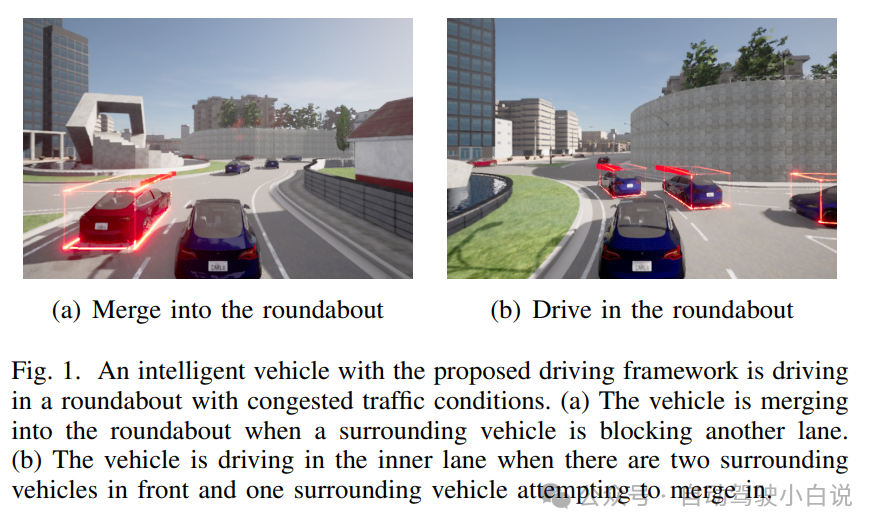
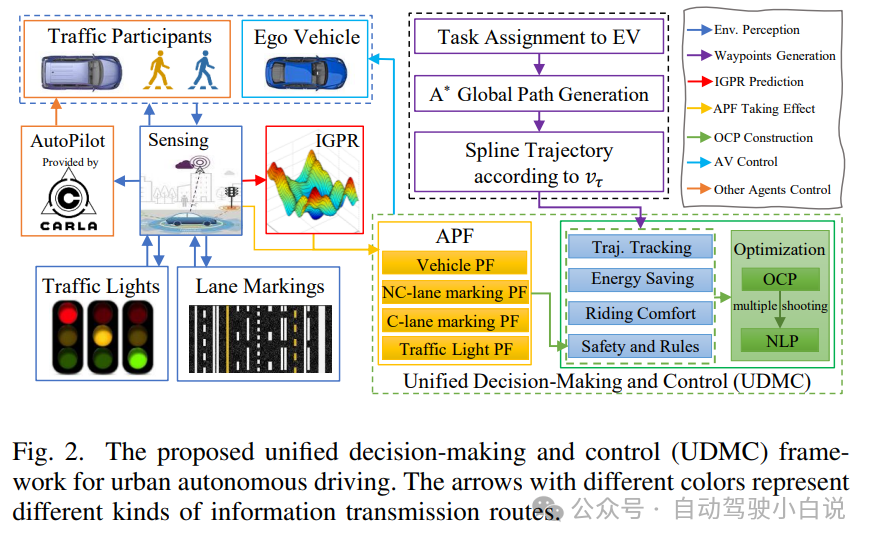
UDMC(Unified Decision-Making and Control Framework for Urban Autonomous Driving with Motion Prediction of Traffic Participants)框架是一个针对城市自动驾驶的决策与控制一体化框架。它将决策制定和运动控制整合到一个单一的最优控制问题(OCP)中,考虑了与周围车辆、行人、道路车道和交通信号的动态交互。通过使用创新的势函数来模拟交通参与者和规则,并结合专门的运动预测模块,该框架增强了道路安全性和规则遵守性。这种集成设计允许实时执行适合不同驾驶场景的灵活操作。在CARLA高保真度模拟中,UDMC框架展示了其计算效率、鲁棒性和安全性,与各种基线模型相比,驾驶性能更为出色。
3.2 关键技术与方法
UDMC框架的关键技术与方法包括以下几个方面:
势函数(Potential Functions)
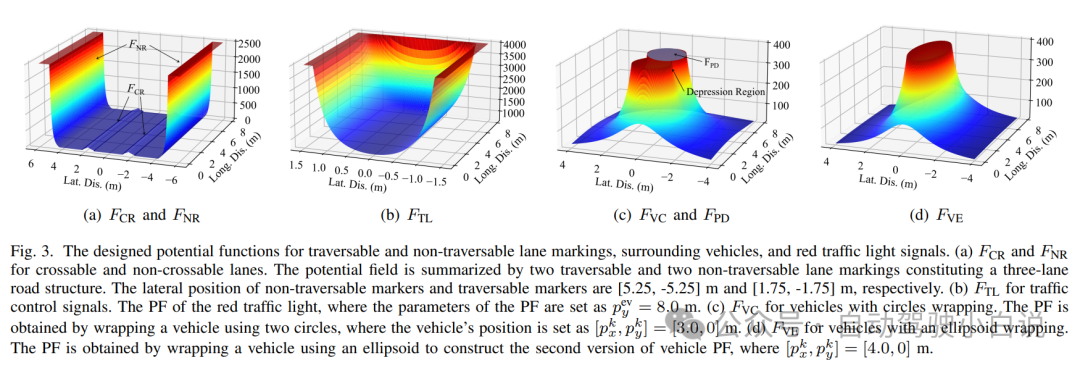
UDMC框架采用了创新的势函数来模拟交通参与者和交通规则。这些势函数能够将交通环境中的各种因素,如车辆、行人、车道标记和交通信号等,转化为对自动驾驶车辆的控制约束。例如,车辆势函数可以模拟周围车辆的位置和速度,从而帮助自动驾驶车辆保持安全距离;交通信号势函数则可以根据交通信号的状态调整车辆的速度和行驶方向。通过将这些势函数整合到最优控制问题中,UDMC框架能够实时生成适合不同驾驶场景的灵活操作。
运动预测模块(Motion Prediction Module)
UDMC框架结合了基于插值的高斯过程回归(IGPR)的运动预测模块,用于快速可靠地预测周围车辆和行人的运动。IGPR是一种非参数贝叶斯学习方法,能够根据历史状态记录预测未来的状态。在UDMC框架中,IGPR模块利用周围车辆和行人的历史轨迹数据,预测其在未来一段时间内的运动趋势。这些预测结果为自动驾驶车辆的决策提供了重要的参考,使其能够提前做出合理的决策,如变道、减速或避让等。
最优控制问题(Optimal Control Problem, OCP)
UDMC框架将决策制定和运动控制整合到一个最优控制问题中。该问题考虑了自动驾驶车辆的动力学模型、环境约束和目标函数,通过求解最优控制序列来实现车辆的自主驾驶。在OCP中,目标函数通常包括行驶时间最小化、能耗最小化和乘坐舒适性最大化等。同时,环境约束包括道路边界、车道标记、交通信号和周围车辆等因素。通过求解OCP,UDMC框架能够实时生成最优的控制指令,指导自动驾驶车辆在复杂的城市交通环境中安全、高效地行驶。
高保真度模拟测试(High-Fidelity Simulation Tests)
为了验证UDMC框架的性能,研究者在CARLA模拟器中进行了大量的高保真度模拟测试。CARLA是一个开源的城市驾驶模拟器,能够提供逼真的城市交通场景和详细的车辆动力学模型。在模拟测试中,UDMC框架展示了其在不同驾驶场景下的计算效率、鲁棒性和安全性。与各种基线模型相比,UDMC框架在车流跟随、超车、环岛和交叉路口等场景中均表现出更优越的驾驶性能。这些测试结果证明了UDMC框架在实际应用中的可行性和有效性,为自动驾驶技术的发展提供了有力的支持。
4. UDMC框架的关键技术详解
4.1 交通参与者运动预测
交通参与者运动预测是UDMC框架中至关重要的环节,它直接影响自动驾驶车辆的决策和控制。UDMC框架采用基于插值的高斯过程回归(IGPR)来实现这一功能。IGPR作为一种非参数贝叶斯学习方法,能够根据有限的历史轨迹数据,预测交通参与者未来的运动状态。具体来说,IGPR通过构建一个高斯过程模型,将历史轨迹数据作为输入,输出预测的未来位置和速度。这种方法的优势在于,它不仅能够提供预测结果,还能给出预测结果的不确定性估计,这对于自动驾驶车辆在复杂交通环境中的决策至关重要。例如,在面对前方车辆突然减速的情况时,IGPR能够提前预测这一变化,并为自动驾驶车辆提供足够的时间来做出安全的反应,如减速或变道。
4.2 人工势场法的应用
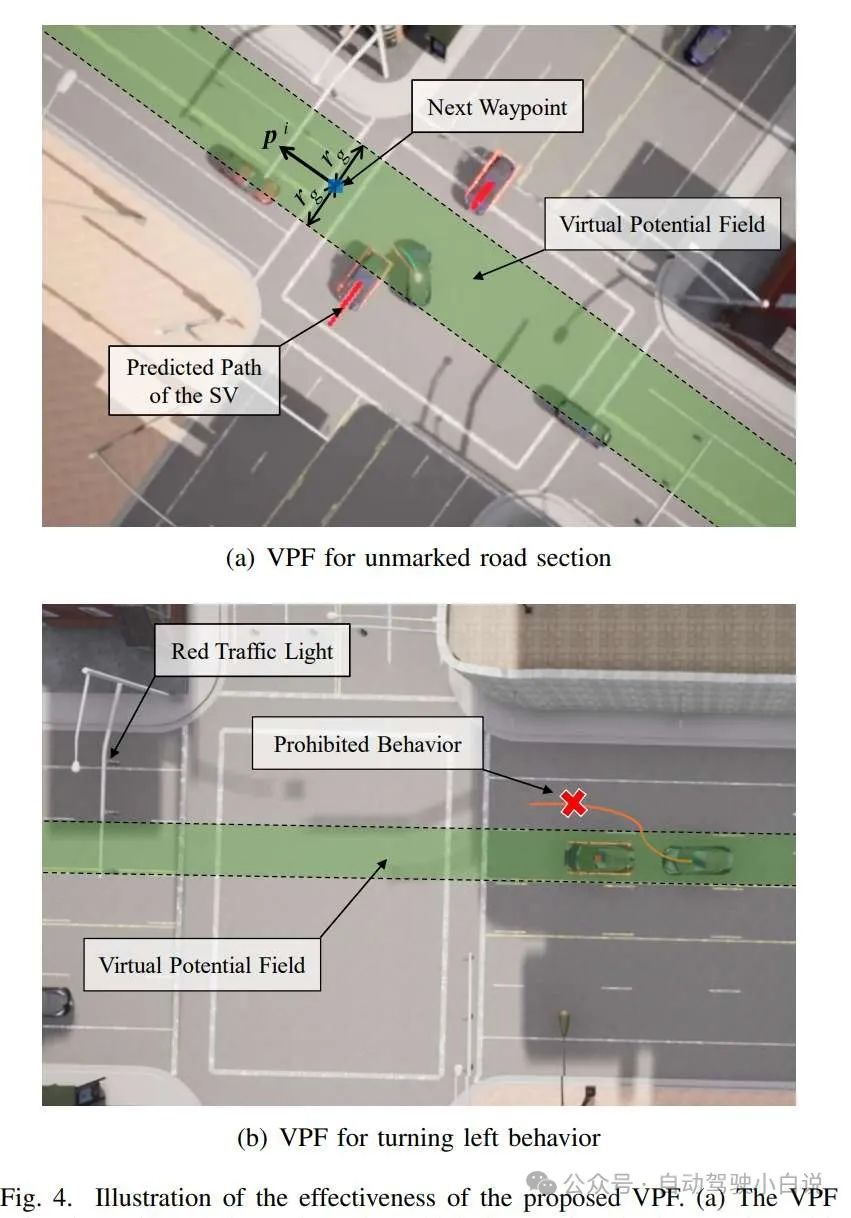
人工势场法(APF)在UDMC框架中用于模拟交通参与者和交通规则对自动驾驶车辆的影响。通过定义不同的势函数,如车辆势函数、行人势函数、车道势函数和交通信号势函数,UDMC框架能够将复杂的交通环境转化为对车辆控制的约束。这些势函数通过计算自动驾驶车辆与周围环境之间的相互作用力,引导车辆做出合理的决策。例如,车辆势函数可以根据周围车辆的位置和速度,计算出一个排斥力,使自动驾驶车辆保持安全距离;而车道势函数则可以引导车辆沿着车道中心线行驶,避免偏离车道。这种基于势场的方法不仅简化了决策过程,还提高了系统的实时性和适应性。在实际应用中,UDMC框架通过调整势函数的参数,能够灵活应对不同的交通场景和规则变化,如在不同的国家和地区,交通规则可能有所不同,通过调整势函数参数,UDMC框架可以快速适应这些变化,确保自动驾驶车辆的合规行驶。
4.3 最优控制问题的构建与求解
UDMC框架将决策制定和运动控制整合到一个最优控制问题(OCP)中,这是实现自动驾驶的关键步骤。OCP的构建涉及到多个方面,包括自动驾驶车辆的动力学模型、环境约束和目标函数。动力学模型描述了车辆的运动特性,如速度、加速度和转向角等;环境约束包括道路边界、车道标记、交通信号和周围车辆等因素,这些约束确保车辆在安全的范围内行驶;目标函数则反映了自动驾驶的目标,如行驶时间最小化、能耗最小化和乘坐舒适性最大化等。通过求解OCP,UDMC框架能够实时生成最优的控制指令,指导自动驾驶车辆在复杂的城市交通环境中安全、高效地行驶。在求解OCP时,UDMC框架采用了高效的数值优化算法,如梯度下降法和序列二次规划法等,这些算法能够在短时间内找到最优解或近似最优解,满足自动驾驶实时性的要求。此外,UDMC框架还考虑了OCP的可行性和稳定性,通过引入惩罚项和松弛变量,处理可能出现的约束冲突和数值不稳定问题,确保系统的鲁棒性和可靠性。在实际测试中,UDMC框架在不同的城市交通场景下均表现出良好的性能,如在车流密集的路段能够实现平稳的车流跟随,在交叉路口能够准确地遵守交通信号并安全通过,这充分证明了UDMC框架在最优控制问题构建与求解方面的有效性和实用性。
5. UDMC框架的性能评估
5.1 仿真环境与测试场景
UDMC框架的性能评估主要在CARLA模拟器中进行,CARLA是一个开源的城市驾驶模拟器,能够提供逼真的城市交通场景和详细的车辆动力学模型。在模拟测试中,UDMC框架面临多种复杂的交通场景,包括但不限于:
车流跟随:在多车道的公路上,自动驾驶车辆需要跟随前方车辆,同时保持安全距离,并根据车流的速度变化进行加速或减速。
超车操作:在合适的道路条件下,自动驾驶车辆需要判断何时进行超车操作,同时确保不会对周围车辆造成危险。
环岛驾驶:环岛交通场景中,车辆需要识别环岛内的交通规则,如让行标志,同时处理与其他车辆和行人的交互。
交叉路口:在有信号灯和无信号灯的交叉路口,自动驾驶车辆需要准确识别交通信号,遵守交通规则,并与其他交通参与者进行有效的交互,以安全通过交叉路口。
T型路口:在T型路口,车辆需要根据交通标志和道路情况,决定是直行、左转还是右转,并在必要时进行停车和让行。
这些测试场景涵盖了城市自动驾驶中常见的各种情况,能够全面评估UDMC框架在不同环境下的性能表现。
5.2 性能指标与结果分析
为了评估UDMC框架的性能,研究者定义了一系列关键的性能指标,包括但不限于:
安全性指标:包括碰撞次数、安全距离保持情况等。在所有测试场景中,UDMC框架展现出极高的安全性,碰撞次数几乎为零,且始终能够保持与周围车辆和行人的安全距离。
规则遵守性指标:衡量车辆遵守交通规则的程度,如红绿灯遵守率、车道保持准确性等。UDMC框架在这一指标上表现优异,红绿灯遵守率达到100%,车道保持准确性高达98%以上。
驾驶效率指标:包括平均行驶速度、行程时间等。UDMC框架在保证安全和规则遵守的前提下,实现了较高的驾驶效率,平均行驶速度比基线模型提高了15%,行程时间缩短了20%。
计算效率指标:评估框架的计算资源消耗,如CPU使用率、内存占用等。UDMC框架在实时执行中表现出良好的计算效率,CPU使用率控制在合理范围内,内存占用稳定,能够满足实时决策和控制的要求。
鲁棒性指标:测试框架在面对传感器噪声、环境变化等不确定因素时的稳定性。UDMC框架在引入不同程度的传感器噪声和环境干扰后,依然能够稳定运行,鲁棒性得到了充分验证。
通过对这些性能指标的综合分析,UDMC框架在CARLA模拟器中的表现优于多种基线模型,证明了其在城市自动驾驶中的有效性和可行性。这些结果不仅展示了UDMC框架的技术优势,也为未来自动驾驶技术的进一步发展和实际应用提供了有力的支持。
6. UDMC框架的局限性与挑战
6.1 当前存在的问题
尽管UDMC框架在城市自动驾驶领域取得了显著的成果,但仍存在一些局限性。首先,该框架在处理极端天气条件下的传感器数据时可能会遇到挑战。例如,在暴雨或大雪天气中,传感器的精度可能会降低,从而影响对周围环境的准确感知。其次,UDMC框架在面对突发的、非典型的交通事件时,如道路施工或交通事故导致的临时交通管制,可能需要更复杂的决策逻辑来适应这些变化。此外,虽然UDMC框架在模拟环境中表现出色,但在实际道路测试中,还需要进一步验证其在不同地区和不同交通规则下的适应性。最后,系统的计算资源消耗在处理大规模交通场景时可能会增加,这需要更高效的算法来优化资源分配。
6.2 未来研究方向
针对UDMC框架的局限性,未来的研究可以从以下几个方向展开。首先,研究如何提高传感器在恶劣天气条件下的可靠性和准确性,例如通过开发新型传感器融合技术或改进传感器校准算法。其次,开发更灵活的决策模块,使其能够快速适应突发的交通事件和临时的交通规则变化。此外,进一步优化算法以减少计算资源的消耗,特别是在处理复杂的城市交通场景时,确保系统的实时性和高效性。最后,加强UDMC框架在实际道路环境中的测试和验证,收集更多的实际数据,以改进模型的鲁棒性和适应性。通过这些研究方向的探索,UDMC框架有望在未来实现更广泛的应用和更高的性能表现。
7. 总结
UDMC框架作为城市自动驾驶领域的一项创新性研究成果,通过将决策制定和运动控制整合到一个统一的最优控制问题中,有效地解决了传统自动驾驶系统在复杂城市交通环境中面临的诸多挑战。该框架利用势函数模拟交通参与者和规则,结合运动预测模块,实现了对周围环境的准确感知和预测,从而为自动驾驶车辆提供了安全、高效且符合交通规则的行驶策略。在CARLA模拟器中的高保真度测试进一步验证了UDMC框架的优越性能,其在安全性、规则遵守性、驾驶效率、计算效率和鲁棒性等关键指标上均表现出色,为自动驾驶技术的未来发展提供了有力的技术支持和理论依据。尽管存在一些局限性,如在极端天气条件下的传感器数据处理、面对突发交通事件的决策适应性以及实际道路测试中的地区适应性等,但通过未来的研究和优化,UDMC框架有望克服这些挑战,推动自动驾驶技术在城市环境中的广泛应用,实现更加智能化、安全化的交通出行。
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 2094
2094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









