 自动驾驶:虚幻与现实间的炼金术,
自动驾驶:虚幻与现实间的炼金术,




作者 | 十字甫 编辑 | 汽车观察者联盟
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【全栈算法】技术交流群
本文只做学术分享,如有侵权,联系删文
在卡夫卡中篇小说《一条狗的研究》中描述了一条空中之狗,常在高空活动,个子极小,“发育不完全”,“皮毛梳理得过分精细”,“并不从事看得见的劳动,而是安歇。”“谁也不能否认,这些狗能漂浮在空中,这真是不可思议,我和狗类一样对此惊讶不已。但我觉得更不可思议的是这种存在物的荒诞,缄默的荒诞。

随着华为车BU的分拆和长安建立合资公司,并且号召车企带资入股,打造智能汽车生态共同体,汽车行业将开始新一轮的业务分拆浪潮。这种变化的背后凸显出两个问题,一个问题是汽车行业对于现金流的需求在增大,面对不断增大的沉没成本,盈利的日子似乎遥遥无期;另一个问题是产业开始分化,以往从下至上的全栈自研模式走向瓦解,更多的是通过业务的协同从上至下展开合作。出现这些问题的根本在于自动驾驶成为汽车行业的“空中之狗”。自动驾驶虽然不是荒谬,但是存在一定的虚幻和缥缈。

伴随着整个智能化产业的发展,这种虚幻和缥缈会不断加重,理论或者期望中的自动驾驶和现实的产品之间存在无法逾越的鸿沟,技术的发展和商业的炒作之间也存在无法逾越的鸿沟,而鸿沟的背后其实是理论和工程的差距。这些差距主要体现在几个方面:

第一个是自动驾驶行业的虚幻和缥缈。从最早的学术界到如今工业界的发展,很显然自动驾驶的理论是没有问题的,也就是描述自动驾驶系统的理论方程是存在的,问题在于工程化的求解。从求解的方法来看,无论是纯视觉还是多源传感器融合都是对正确解的无限逼近过程;从结果方面来看,辅助驾驶产品搭载率在不断提升。根据乘联会发布相关数据,2023年上半年新能源汽车L2级辅助驾驶功能装车率已经接近40%,而L2+级辅助驾驶功能搭载率为4.1%。

从市场端看,自动驾驶领域的公司实现盈利的很少。以知行科技为例,根据IPO提交的信息显示,按2022年自动驾驶域控制器解决方案销售收入计,知行汽车是中国第四大自动驾驶域控制器提供商,市场份额为8.6%。财报显示,2020-2022年公司分别实现收入4766万元、1.78亿元、13.26亿元,同期亏损分别达5382.7万、4.64亿、3.42亿。自动驾驶行业很多时候为了说明辅助驾驶领域的发展趋势,将L2和L2+的市场两个数据相加,然而这两个数据是有很大区别的,首先是L2和L2+在系统架构方面并不统一;其次L2和L2+的理论和工程需求也不同;最后是 L2+级辅助驾驶功能的搭载并没有形成市场规模化,究其原因仍然是老生常谈的几个问题,自动驾驶技术的泛化能力不足、用户对功能的感知不强、系统成本较高、功能的定义不完善等等。也就是说,自动驾驶的问题不仅仅是在L3级以上的高级辅助驾驶领域,在L2+级辅助驾驶领域仍然存在一些技术和商业的虚幻和缥缈问题。要解决这个问题,无非有两种方式,一种是直接跳过将功能定义放大,通过更高阶的技术方法实现功能,例如端到端的方法、L3级自动驾驶的相关法规的落地加快高级自动驾驶的产品化;另一种是将功能定义缩小,通过产品的规模化迭代推动技术和商业模式的成熟。不管是哪一种方式,核心思想仍然是理论和工程的结合。
第二方面是自动驾驶技术的虚幻和缥缈。在大模型领域有一个问题一直被反复提到,那就是大模型的幻觉问题。也就是大模型输出的结果是“睁眼说瞎话”,生成的内容与输入存在冲突、生成的内容前后矛盾、生成的内容出现常识性的错误,针对这个问题,行业内没有太好的解决办法。同样的问题也一定会出现在自动驾驶领域,这也就是出现自动驾驶的Corner case 无穷无尽,尤其是在感知识别方面。所谓的模型其实就是物理世界的一种抽象,大模型的核心仍然是深度学习模型。
而深度学习之父——Hinton,曾经提出深度学习的本质可能就是数据的压缩。所有的神经网络目标都是将数据从高维压缩到低维的结构。

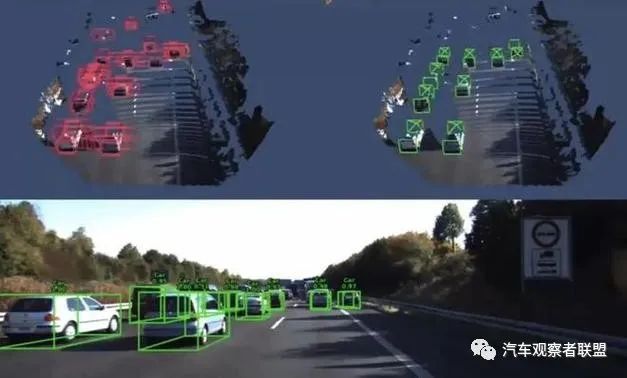
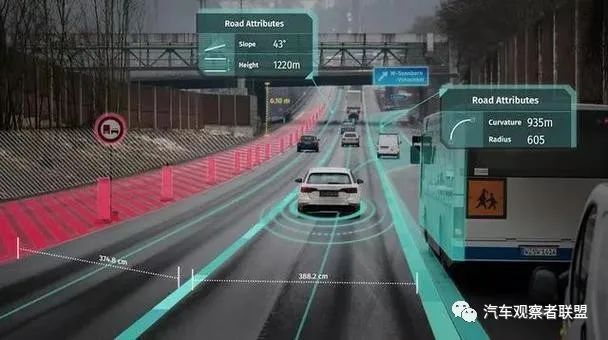
在感知领域,目前行业内比较常用的BEV+Transformer的感知架构,成为自动驾驶行业香饽饽,其本质上也是将物理世界的高维数据压缩成低维的结构数据,做的事情就是机械数据压缩和插值,也就是专业名词称之为编码和解码。随着深度学习在视觉感知领域的兴起,为自动驾驶的发展带来了许多的幻想,产生新幻想的主要原因有几点:首先是深度学习理论和工程实践的脱节,BEV+Transformer的感知架构本质上也是深度学习的工程实践,从理论上看,基于Transformer的架构可解释性差,输出效果严重依赖数据集,所以这种架构性价比其实不太高。然而在工程实践端却成为自动驾驶行业追捧的热点,前赴后继的投入资源进行智能化的提升。

可以说BEV+Transformer的感知架构是当前比较流行的自动驾驶感知架构,但不会是最终的自动驾驶系统感知架构,至于新的感知架构何时会出现也不好预测,这也是自动驾驶行业底层算法技术体现出的虚幻和缥缈性,人工智能是把双刃剑,加速一切的变化,同样也让一切都不可预测;其次是自动驾驶技术自身的发展局限性。自动驾驶早期的研究生根于计算机视觉,也就是说自动驾驶的系统无论是纯视觉还是多源感知融合,无论是有高精度地图还是无图,在算法架构上仍然是视觉为主导的。虽然谷歌的DeepMind定义通用智能是超越人类的AI,但是这个概念比较模糊。

现阶段机器智能的参照样本仍然是人,首先人类所获取的视觉信息涵盖多个维度,包括对象的外观、形状、颜色、质地,以及与这些对象相关的场景情境和光照信息和感觉,其次不同的场景人类获取的视觉信息是不同的,比如看到人脸和看到道路车牌,这种物理世界场景的不同映射到数字算法中就需要不同的模型完成相对应的功能,场景的碎片化导致机器识别的模型碎片化;最后是视觉数据不同于自然语言数据,视觉数据是非结构化数据,这为训练视觉模型带来更大的挑战。

所以,在自动驾驶系统中,现阶段感知的技术存在天然的瓶颈和障碍,虽然基于深度学习的大模型为自动驾驶带来新的研究发展一个方向,决策规划部分也逐渐开始使用深度学习的方法,但是视觉的问题仍然存在,新的方法只是优化了解决方案,但是没有求出具体的解。在这种局限中,新的方法为行业增加了新的“幻想”,前赴后继的试图求出未知方程的解;最后是人工智能技术的全面开花。自动驾驶技术本质上也是智能体的一种分类。在每一次人工智能技术的起落之间都会产生一些新的应用,汽车作为人工智能技术应用的一个载体,在汽车产品端从座舱到驾驶,人工智能的应用无处不在。

随着人工智能技术新一轮热潮的到来,自动驾驶也必将成为热门领域,所以只要人工智能技术仍然存在幻想,那么自动驾驶也一定存在虚幻和缥缈。以Open AI的GPT迭代的速度为例,
2018年6月,GPT-1发布,参数量1.17亿,预训练数据量约5GB;2019年2月,GPT-2发布,参数量15亿,预训练数据40GB;
2020年5月,GPT-3发布,参数量1750亿,预训练数据量45TB;
2022年11月,GPT-3.5发布,参数量千亿级,预训练数据量达到百T级别;
2023年3月,GPT-4发布,参数量达到3.5万亿级别。
基于transformer架构的GPT,随着参数量和预训练数据量的提升,交互方式和思维不断友好,期待模型的智能涌现。所以目前人工智能在互联网科技领域的热潮,自动驾驶也会随着起伏。

自动驾驶作为汽车行业新的技术升级,也面临着现实和虚幻、理想和缥缈的掺杂。很多时候大家认为技术能改变世界,这一点毋庸置疑。但是技术可能改不了某个单一的个体,例如某个人或者某个公司。可以改变单一个体的一定是实实在在的产品,行业需要虚幻和缥缈,而单个个体需要的是现实。自动驾驶行业确实是一个令人惊讶或者欣喜的领域,集合了机械、计算机、心理学等等领域的科学知识,错综复杂的领域参与,能力背景不同的人员加入,让自动驾驶行业成为一个术士的炼丹炉,人人皆知数据、算力和算法是炼丹的三要素,唯独无法准确写出化学反应方程式和控制产出物,只能期待每一次的实际产物体验。这也就造成了自动驾驶的媒体舆论阵地成为主要的攻坚阵地,而非实际的产品端。这也就可以解释自动驾驶各家掌门人不断的在媒体上出现惊人语录来增加曝光率,毕竟一般人的精力是有限的(极少天才型除外),频繁的出现在媒体界面的精力一定会消耗在产品端的聚焦。无论是华为和小鹏之间的功能争议还是大洋波岸的马斯克在社交媒体对FSD的各种“画饼”式宣传,归根结底是因为自动驾驶仍然是一只“空中之狗”,只有面对一个虚幻和缥缈的“空中之狗”的时候,人类才会更多的关注语言的描述。

毫无疑问,科技的进步促使自动驾驶行业一直会是加速前进,只是有些公司必定成为行业前进道路上的铺路石自动驾驶的虚幻和缥缈,华为也顶不住了,下一个又将会是谁呢?
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2400人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









