






编辑 | 募格学术
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
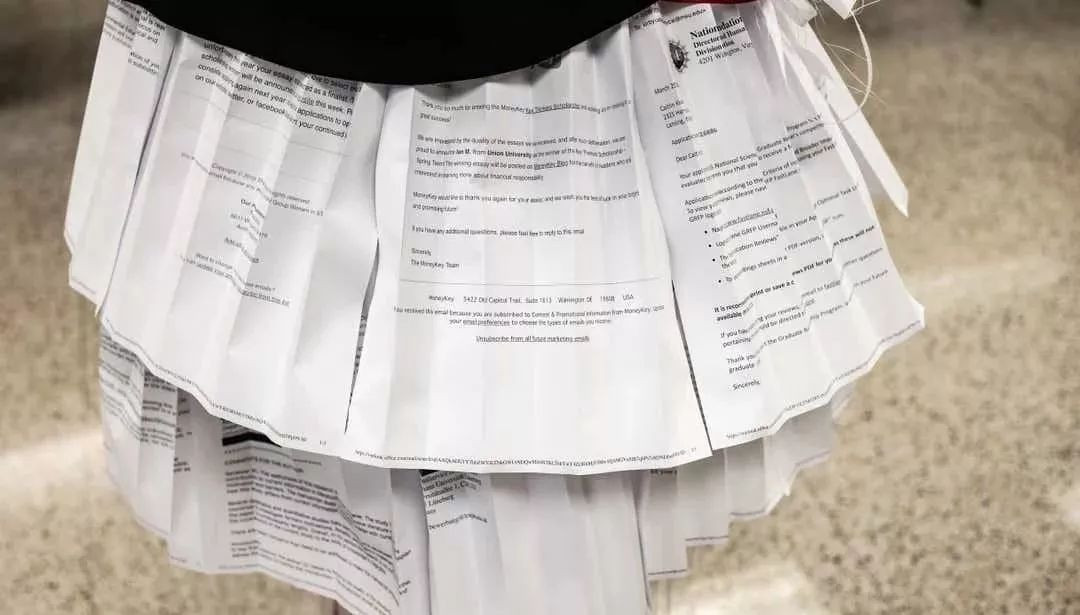
Caitlin Kirby是密歇根州立大学地球与环境科学的博士生,她在自己的博士论文答辩时,穿着一条自己用17封拒信做成的裙子,出现在评委老师们的眼前。

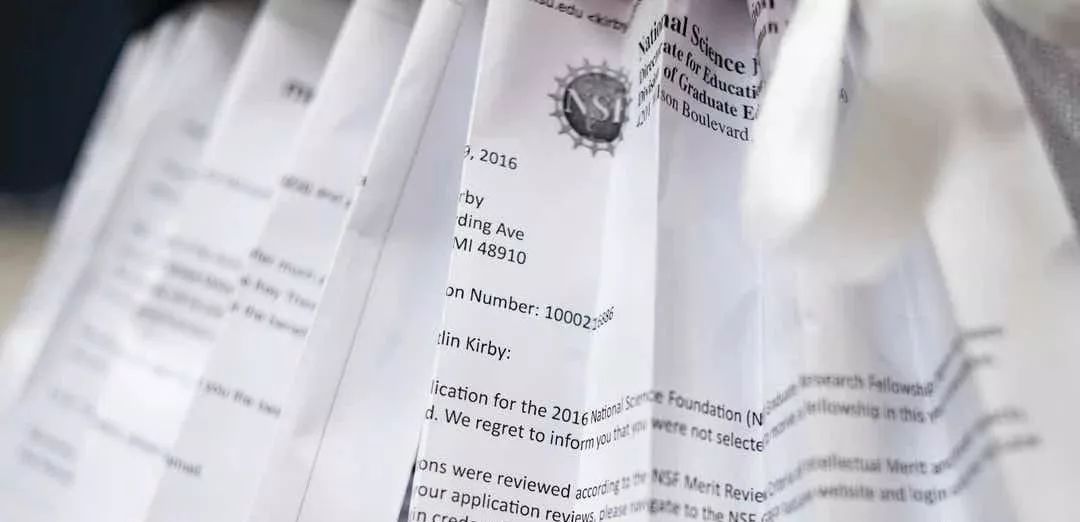
做裙子的这17封拒信来自于她在该校攻读地球与环境科学博士学位期间,分别是在奖学金申请、论文投稿、会议投稿过程中收到的。
她通过检索用“不幸”和“我们很遗憾通知你”两个关键词,找出了这些邮件,然后选取了其中的一部分,做成了这条裙子。Caitlin表示,自己收到的拒信远不止这些,做完裙子还剩很多。
在博士学位论文答辩中,Caitlin Kirby说,她之所以这条“拒信裙”,并不是为了表示抗议,不在于“看我现在多牛x,你们这些有眼无珠的家伙”,而是为了表明,在实现目标的过程中,遭到拒绝也是一个本来就应有的组成部分。
她说:“重温那些旧信件,做那条裙子的整个过程让我想起 “你必须申请多次才可能成功,在这个过程里,很自然的一部分就是不断被拒绝。”
在有所成就的路上,铺满了令人沮丧的拒信。
Caitlin毕业后要开始申请工作,她已经准备做一条更长的“拒信裙”了。

她之所以选择这种方式参加答辩,是想告诉大家,她这一路走来并非一帆风顺,每封拒稿信都是最好的明证。
面对拒稿,Caitlin Kirby 也曾苦恼,但她会努力克服这些失败,并从中吸取教训,直到最后成功发表。正如导师告诉她的:“科学就是朝着死胡同的方向前进,然后不得不转身重新开始”,正是 Caitlin Kirby 的乐观心态,最后终于迎来了华丽的转身。
现在的 Caitlin Kirby 已经成为密歇根州立大学某教育研究项目的主管了,美好的故事也有了一个美好的结尾。
网友评论
Caitlin Kirby的这一举动让国内外很多硕博研究生们产生了共鸣。毕竟谁还没收到过几封拒信呢?网友更是脑洞大开,谈了谈自己的拒信都能做成些什么。




当然啦,不知道大家还记不记得我们曾经报道过的“嘤嘤怪”老师邢立达。对,就是那位发表了100多篇SCI论文,一己之力提高母校排名30位次的那位老师。他的拒信回答是这样的

那大概.....只能做条内裤了...(没有酸的意思 )
)

不过最主要的,被拒绝的多,说明尝试的多,真的硕博敢于直面惨淡的人生~
希望大家将来能都穿着接受信做成的衣服去参加答辩~
视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)
(扫码学习最新视频)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









