



编辑 | 学术志
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
我们常说师生关系天注定的,从小学到大学,什么老师给你上课都是自己选择不了的,不过研究生与导师之间是双向选择的,导师也有权利去挑选自己的学生。
考上研究生之后就需要经常和导师沟通,稍不注意就会踩雷,所以要掌握沟通的技巧并且要细心,否则做出令人哭笑不得的“蠢事”,闹出很多笑话。
研究生和导师日常交流犹如翻车现场
冷汗直流,“脚趾抠出了三室一厅”
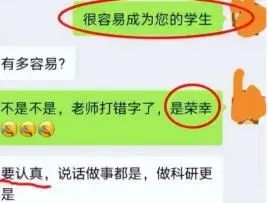
现在是网络时代,每个人都会遇到打错字并发出的尴尬瞬间,但是朋友之间出现错字并不会在意,笑一笑就过去了。如果是和导师交流的时候打出令人尴尬的词汇,当时恨不得找个地缝钻进去。
不得不说,这是一个很低级的错误,但是相信导师应该也知道学生并不是故意的,不过细节决定的成败,要是一直这样粗心大意,以后搞科研的时候也难免没办法集中精神,频频出错。
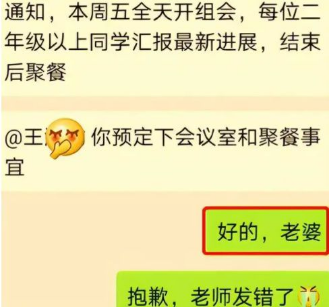
上面的同学把老师打成了“老鼠”,但是接下来这位更过分,居然打成了“老婆”,其他不了解情况的同学可能会以为自己发现了不得了的秘密,这种甜蜜的称呼想必会让双方更尴尬吧,可能当时学生尴尬到用脚趾抠出来三室一厅。
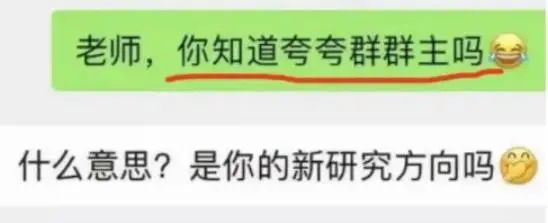
很多老师都是比较中规中矩的中年人,有些跟不上时代的潮流,网络流行用语更是不了解,这时就需要学生耐心的给老师讲解,以免导师误会学生意思,闹出了笑话,当然这只是针对于相处的比较好的老师。
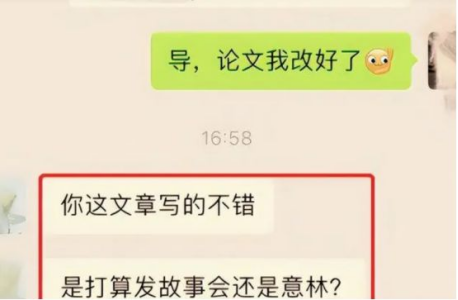
都说读研比考研更不容易,尤其是到每年的毕业季,每个人都要写论文,当学生没有思路的时候,想借鉴下网络热文,但是当借鉴的正好是自己导师写得文章的时候,这种巧合真是让人尴尬的不知所措,直接“撞枪口上了”,导师都不用费尽心思的去查重,光是看着都有熟悉的感觉。

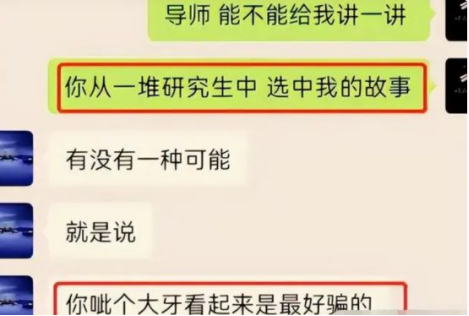
在没有考上研究生之前,很多人都以为导师都是高高在上的,不可逾越的,但其实不然,很多导师和研究生都是亦师亦友。
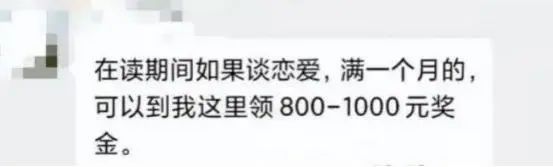
甚至有导师鼓励学生恋爱亲自掏腰包给予奖励。导师也是为学生操碎了心,不过有这样善解人意的导师也是学生的幸运。
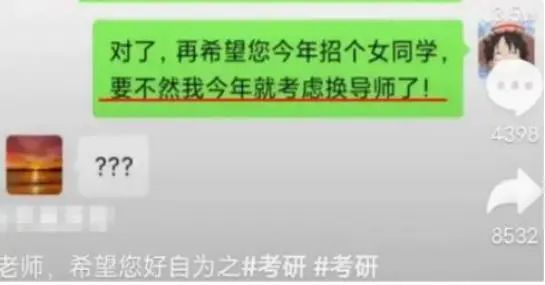
还有另一种极端的情况,下面这名同学就不知天高地厚,还没有进入导师的门下,就开始要求导师,有点为这名学生的未来担心。
对待老师,长辈应该有最起码的尊重,这名导师应该也庆幸在收入门之前看清了这名同学的“真面目”。
研究生和导师的关系需要注意,
千万别“踩雷”,把握好尺度很关键
导师与学生的学习和毕业都息息相关,不能走得太近也不能走得太远,做事情也要有原则和底线,否则和导师之间的关系就会变的很微妙。
有一些事项需要格外的注意。首先,与导师相处是建立在平等和尊重的前提下,少说话多做事,正所谓“言多必失”。多帮导师分担一些工作,锻炼了自己的同时也让导师看到自己能力,但是要注意做该做的事,说该说的话,不要总想着出风头。
其次和导师沟通要注意时机和时间,在不打扰老师的时间内,言简意赅的把自己的事情清清楚楚的描述出来,最高效率的解决问题。
最后要实事求是,导师都是阅人无数的,会与不会都要实事求是,不要在导师面前耍小聪明。如果遇到了佛系的导师,自己也不要躺平,坚持每周都要跟导师汇报工作进展和遇到的问题,在导师面前刷存在感,获取更多的指导。
虽然说研究生也会有各项补助,或者学生也可以勤工俭学,但是如果学生一边打工一边学习的话,就会分散很多精力,一个人的精力是有限的,这样也会耽误学习。
即便是有补助,也只能解决短暂的困难,可能连日常开销都很困难,所以学生一定要慎重选择,选择自己适合的道路才是最主要的。
视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)
(扫码学习最新视频)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称

















 140
140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









