



 Sparks, 一家领先的输送带和电动皮带轮制造商, 推出了全新的在线3DCAD模型数据目录,允许客户配置并下载其Dura-DrivePlus电动皮带轮的数字化模型。借助CADENAS构建的配置器,客户可以轻松搜索、配置和下载100多种原始CAD格式的3DCAD模型,简化了业务流程并提升了客户体验。
Sparks, 一家领先的输送带和电动皮带轮制造商, 推出了全新的在线3DCAD模型数据目录,允许客户配置并下载其Dura-DrivePlus电动皮带轮的数字化模型。借助CADENAS构建的配置器,客户可以轻松搜索、配置和下载100多种原始CAD格式的3DCAD模型,简化了业务流程并提升了客户体验。
传送带制造商和分销商通过提供可配置的电动皮带轮的3D CAD模型数据,用数字化服务打造全新客户体验
Sparks是国际公认的输送带、电动皮带轮和其他输送机解决方案的厂商、制造商和分销商,提供定制的输送带、模块化塑料带、聚氨酯同步带和电动皮带轮。公司为客户定制符合其需求的产品,并致力于为客户的输送机需求提供最佳的解决方案。新的在线配置器通过发布产品的可配置3D CAD模型来简化这一流程。

以前,公司只能提供产品系列中五个不同皮带轮的静态2D CAD图。用户无法进行任何配置或自定义,所以也无法满足客户对详细数据的需求。无论是回头客还是新客户对可配置3D模型的需求都愈来愈强烈。
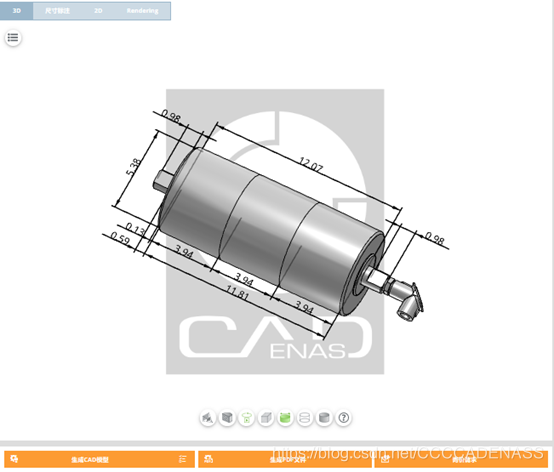
现在,斯帕克斯自动化皮带公司(Sparks)为其颇受欢迎的Dura-Drive Plus电动皮带轮发布了一个全新的3D CAD模型数据在线目录。使用的配置器由CADENAS为其构建,客户能够借助此配置器轻松地搜索、配置和下载数字化3D CAD模型,从而简化了客户与Sparks之间的业务流程,快速达成交易。此外,使用Sparks 的新型在线配置器的客户可以以100多种原始CAD格式来下载3D CAD模型,并可将带有其产品3D预览图和属性参数的数字化数据表发送给公司内部同事。

















 658
658

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









