









 本文介绍如何为YOLOv3生成最佳Anchor Boxes尺寸,采用k-means聚类算法并自定义距离度量公式以最大化IOU值,确保目标检测的准确性。
本文介绍如何为YOLOv3生成最佳Anchor Boxes尺寸,采用k-means聚类算法并自定义距离度量公式以最大化IOU值,确保目标检测的准确性。
k-means需要有数据,中心点个数是需要人为指定的,位置可以随机初始化,但是还需要度量到聚类中心的距离。这里怎么度量这个距离是很关键的。
距离度量如果使用标准的欧氏距离,大盒子会比小盒子产生更多的错误。例 。因此这里使用其他的距离度量公式。聚类的目的是anchor boxes和临近的ground truth有更大的IOU值,这和anchor box的尺寸没有直接关系。自定义的距离度量公式:
。因此这里使用其他的距离度量公式。聚类的目的是anchor boxes和临近的ground truth有更大的IOU值,这和anchor box的尺寸没有直接关系。自定义的距离度量公式:
到聚类中心的距离越小越好,但IOU值是越大越好,所以使用 1 - IOU,这样就保证距离越小,IOU值越大。
使用的聚类原始数据是只有标注框的检测数据集,YOLOv2、v3都会生成一个包含标注框位置和类别的TXT文件,其中每行都包含
,即ground truth boxes相对于原图的坐标,
是框的中心点,
是框的宽和高,N是所有标注框的个数;
首先给定k个聚类中心点
,这里的
是anchor boxes的宽和高尺寸,由于anchor boxes位置不固定,所以没有(x,y)的坐标,只有宽和高;
计算每个标注框和每个聚类中心点的距离 d=1-IOU(标注框,聚类中心),计算时每个标注框的中心点都与聚类中心重合,这样才能计算IOU值,即
。将标注框分配给“距离”最近的聚类中心;
所有标注框分配完毕以后,对每个簇重新计算聚类中心点,计算方式为
,
是第i个簇的标注框个数,就是求该簇中所有标注框的宽和高的平均值。
重复第3、4步,直到聚类中心改变量很小。
代码实现主要是AlexeyAB/darknet中scripts/gen_anchors.py,这里根据yolov2,yolov3的版本不同进行部分修改。yolov2的配置文件yolov2.cfg需要的anchors是相对特征图的,值很小基本都小于13;yolov3的配置文件yolov3.cfg需要的3个anchors是相对于原图来说的,相对都比较大。还有输入图片的大小(32的倍数)对于输出也是有影响的。
例:
yolov2.cfg中[region] anchors = 0.57273, 0.677385, 1.87446, 2.06253, 3.33843, 5.47434, 7.88282, 3.52778, 9.77052, 9.16828
yolov3.cfg中[region] anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
-
from os import listdir -
from os.path import isfile, join -
import argparse -
#import cv2 -
import numpy as np -
import sys -
import os -
import shutil -
import random -
import math -
def IOU(x,centroids): -
''' -
:param x: 某一个ground truth的w,h -
:param centroids: anchor的w,h的集合[(w,h),(),...],共k个 -
:return: 单个ground truth box与所有k个anchor box的IoU值集合 -
''' -
IoUs = [] -
w, h = x # ground truth的w,h -
for centroid in centroids: -
c_w,c_h = centroid #anchor的w,h -
if c_w>=w and c_h>=h: #anchor包围ground truth -
iou = w*h/(c_w*c_h) -
elif c_w>=w and c_h<=h: #anchor宽矮 -
iou = w*c_h/(w*h + (c_w-w)*c_h) -
elif c_w<=w and c_h>=h: #anchor瘦长 -
iou = c_w*h/(w*h + c_w*(c_h-h)) -
else: #ground truth包围anchor means both w,h are bigger than c_w and c_h respectively -
iou = (c_w*c_h)/(w*h) -
IoUs.append(iou) # will become (k,) shape -
return np.array(IoUs) -
def avg_IOU(X,centroids): -
''' -
:param X: ground truth的w,h的集合[(w,h),(),...] -
:param centroids: anchor的w,h的集合[(w,h),(),...],共k个 -
''' -
n,d = X.shape -
sum = 0. -
for i in range(X.shape[0]): -
sum+= max(IOU(X[i],centroids)) #返回一个ground truth与所有anchor的IoU中的最大值 -
return sum/n #对所有ground truth求平均 -
def write_anchors_to_file(centroids,X,anchor_file,input_shape,yolo_version): -
''' -
:param centroids: anchor的w,h的集合[(w,h),(),...],共k个 -
:param X: ground truth的w,h的集合[(w,h),(),...] -
:param anchor_file: anchor和平均IoU的输出路径 -
''' -
f = open(anchor_file,'w') -
anchors = centroids.copy() -
print(anchors.shape) -
if yolo_version=='yolov2': -
for i in range(anchors.shape[0]): -
#yolo中对图片的缩放倍数为32倍,所以这里除以32, -
# 如果网络架构有改变,根据实际的缩放倍数来 -
#求出anchor相对于缩放32倍以后的特征图的实际大小(yolov2) -
anchors[i][0]*=input_shape/32. -
anchors[i][1]*=input_shape/32. -
elif yolo_version=='yolov3': -
for i in range(anchors.shape[0]): -
#求出yolov3相对于原图的实际大小 -
anchors[i][0]*=input_shape -
anchors[i][1]*=input_shape -
else: -
print("the yolo version is not right!") -
exit(-1) -
widths = anchors[:,0] -
sorted_indices = np.argsort(widths) -
print('Anchors = ', anchors[sorted_indices]) -
for i in sorted_indices[:-1]: -
f.write('%0.2f,%0.2f, '%(anchors[i,0],anchors[i,1])) -
#there should not be comma after last anchor, that's why -
f.write('%0.2f,%0.2f\n'%(anchors[sorted_indices[-1:],0],anchors[sorted_indices[-1:],1])) -
f.write('%f\n'%(avg_IOU(X,centroids))) -
print() -
def kmeans(X,centroids,eps,anchor_file,input_shape,yolo_version): -
N = X.shape[0] #ground truth的个数 -
iterations = 0 -
print("centroids.shape",centroids) -
k,dim = centroids.shape #anchor的个数k以及w,h两维,dim默认等于2 -
prev_assignments = np.ones(N)*(-1) #对每个ground truth分配初始标签 -
iter = 0 -
old_D = np.zeros((N,k)) #初始化每个ground truth对每个anchor的IoU -
while True: -
D = [] -
iter+=1 -
for i in range(N): -
d = 1 - IOU(X[i],centroids) -
D.append(d) -
D = np.array(D) # D.shape = (N,k) 得到每个ground truth对每个anchor的IoU -
print("iter {}: dists = {}".format(iter,np.sum(np.abs(old_D-D)))) #计算每次迭代和前一次IoU的变化值 -
#assign samples to centroids -
assignments = np.argmin(D,axis=1) #将每个ground truth分配给距离d最小的anchor序号 -
if (assignments == prev_assignments).all() : #如果前一次分配的结果和这次的结果相同,就输出anchor以及平均IoU -
print("Centroids = ",centroids) -
write_anchors_to_file(centroids,X,anchor_file,input_shape,yolo_version) -
return -
#calculate new centroids -
centroid_sums=np.zeros((k,dim),np.float) #初始化以便对每个簇的w,h求和 -
for i in range(N): -
centroid_sums[assignments[i]]+=X[i] #将每个簇中的ground truth的w和h分别累加 -
for j in range(k): #对簇中的w,h求平均 -
centroids[j] = centroid_sums[j]/(np.sum(assignments==j)+1) -
prev_assignments = assignments.copy() -
old_D = D.copy() -
def main(argv): -
parser = argparse.ArgumentParser() -
parser.add_argument('-filelist', default = r'E:\BaiduNetdiskDownload\darknetHG8245\scripts\train.txt', -
help='path to filelist\n' ) -
parser.add_argument('-output_dir', default = r'E:\BaiduNetdiskDownload\darknetHG8245', type = str, -
help='Output anchor directory\n' ) -
parser.add_argument('-num_clusters', default = 0, type = int, -
help='number of clusters\n' ) -
''' -
需要注意的是yolov2输出的值比较小是相对特征图来说的, -
yolov3输出值较大是相对原图来说的, -
所以yolov2和yolov3的输出是有区别的 -
''' -
parser.add_argument('-yolo_version', default='yolov2', type=str, -
help='yolov2 or yolov3\n') -
parser.add_argument('-yolo_input_shape', default=416, type=int, -
help='input images shape,multiples of 32. etc. 416*416\n') -
args = parser.parse_args() -
if not os.path.exists(args.output_dir): -
os.mkdir(args.output_dir) -
f = open(args.filelist) -
lines = [line.rstrip('\n') for line in f.readlines()] -
annotation_dims = [] -
for line in lines: -
line = line.replace('JPEGImages','labels') -
line = line.replace('.jpg','.txt') -
line = line.replace('.png','.txt') -
print(line) -
f2 = open(line) -
for line in f2.readlines(): -
line = line.rstrip('\n') -
w,h = line.split(' ')[3:] -
#print(w,h) -
annotation_dims.append((float(w),float(h))) -
annotation_dims = np.array(annotation_dims) #保存所有ground truth框的(w,h) -
eps = 0.005 -
if args.num_clusters == 0: -
for num_clusters in range(1,11): #we make 1 through 10 clusters -
anchor_file = join( args.output_dir,'anchors%d.txt'%(num_clusters)) -
indices = [ random.randrange(annotation_dims.shape[0]) for i in range(num_clusters)] -
centroids = annotation_dims[indices] -
kmeans(annotation_dims,centroids,eps,anchor_file,args.yolo_input_shape,args.yolo_version) -
print('centroids.shape', centroids.shape) -
else: -
anchor_file = join( args.output_dir,'anchors%d.txt'%(args.num_clusters)) -
indices = [ random.randrange(annotation_dims.shape[0]) for i in range(args.num_clusters)] -
centroids = annotation_dims[indices] -
kmeans(annotation_dims,centroids,eps,anchor_file,args.yolo_input_shape,args.yolo_version) -
print('centroids.shape', centroids.shape) -
if __name__=="__main__": -
main(sys.argv)
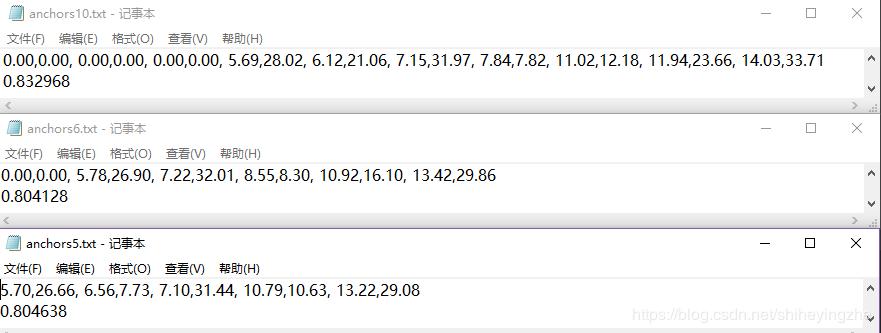
这是其中的yolov3的结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









