




* 源自CS224n笔记[4]:自然语言中的依存分析(Dependency Parsing) - 知乎 (zhihu.com)
* 3&4的神经网络直接跳了,这个学过了,我们直接看224n的lecture 5,这个小节也不太重要,快速过一下。
* 224n的assignment做了一部分,后面再统一更新。
目录
1.1 传统的基于转移的依存分析(Transition-based Parsing)
1.2 神经依存分析(Neural Dependency Parsing)
一、什么是依存分析
自然语言处理任务中,有很重要的一块,就是分析语言的结构。语言的结构,一般可以有两种视角:
- 组成关系(Constituency)
- 依赖关系(Dependency)
前者,主要关心的是句子是怎么构成的,词怎么组成短语。所以研究Constituency,主要 是研究忽略语义的“ 语法” 结构(content-free grammars) 。
后者,依赖关系,则主要关心的是句子中的每一个词, 都依赖于哪个其他的词。 比如下面这个句子:
“瞧这个可爱的小傻瓜!”
- “傻瓜”,是“瞧” 这个动作的对象,因此“傻瓜”是依赖于“瞧”的;
- “可爱的”、“小” 都是修饰“傻瓜”的,因此,这两个形容词都是依赖于“ 傻瓜” 的;
- “这个”同样是指示“傻瓜”的,因此它也依赖于“傻瓜” 。
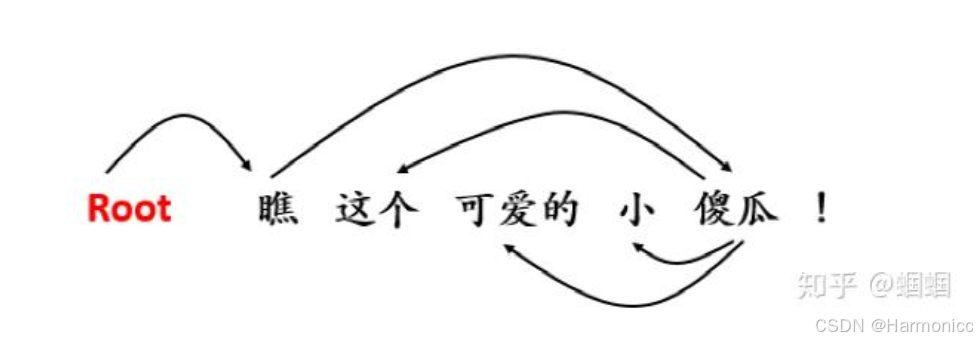
注意,在图中我们增加了一个根节点“Root”,这是为了让“瞧”这个字也有依赖的对象。
下面我们来介绍如何让机器自动地帮我们来分析句子的结构。
1.1 传统的基于转移的依存分析(Transition-based Parsing)
这里主要介绍Nivre在2003年提出的“Greedy Deterministic Transition-based Parsing”方法,一度成为依存分析的标准方法。这里我简单地介绍一下它的工作原理。
我们构造一个三元组,分别是Stack、Buffer和一个Dependency Set。
- Stack最开始只存放一个Root节点;
- Buffer则装有我们需要解析的一个句子;
- Set中则保存我们分析出来的依赖关系, 最开始是空的。
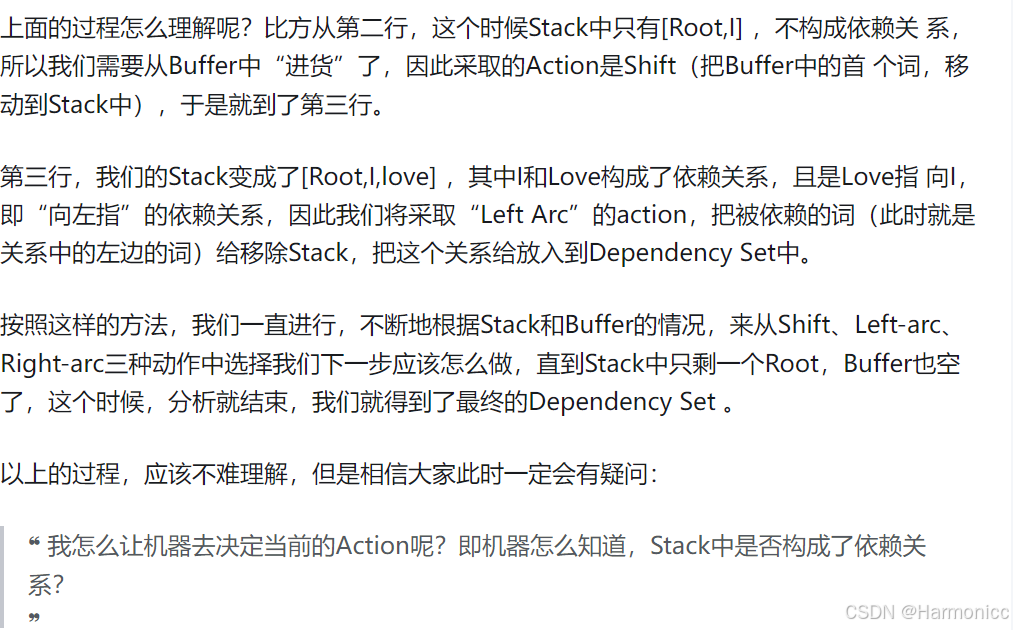
我们要做的事情,就是不断地把Buffer中的词往Stack中推,跟Stack中的词判断是否有依 赖关系,有的话则输出到Set中,直到Buffer中的词全部推出,Stack中也仅剩一个 Root,就分析完毕了。
下面,我通过一个十分简单的例子,来演示这个过程。这次,我们分析的句子是:

在Nivre的年代,这里使用是机器学习的方法, 需要做繁重的特征工程.这里的特征,往往 有个二值特征,即无数个指示条件作为特征,来训练模型,可以想象这么高纬度的 特征是十分稀疏的。因此,这种模型的95%左右的解析时间,都花费在计算特征上。这也 是传统方法的最要问题。
1.2 神经依存分析(Neural Dependency Parsing)
神经依存分析方法,是斯坦福团队2014年的研究成果,主要就是利用了神经网络的方法代 替了传统机器学习方法、用低维分布式表示来代替传统方法的复杂的高维稀疏特征表示。而 整个解析的过程,依然是根据之前的Transition-based方法。
首先明确,我们的预测任务,是「根据当前的状态,即Stack、Buffer、Set的当前状态,来构建特征,然后预测出下一步的动作」。
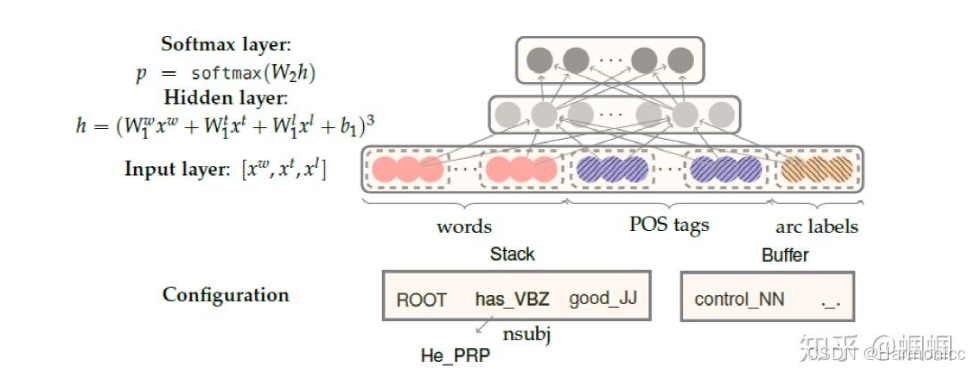
在神经依存分析中,我们的特征是怎么构建的呢?我们可以利用的信息包括词(word)、词性(postag)和依赖关系的标签(label)。我们对这三者,都进行低维分布式表示,即通过Embedding的方法,把离散的word、label、tag都转化成低维向量表示。
对于一个状态,我们可以选取stack、Buffer、set中的某些词和关系,构成一个集合,然 后把他们所有的embedding向量都拼接起来,这样就构成了该状态的特征表示。
至于选择哪些词、关系,这个就是一个「经验性」的东西了,在斯坦福的论文中可以详细了 解。整个模型的网络结构也十分简洁:
这个小节其实不太重要,以后不会遇到什么问题了再回来检索就行。
本小节结束

















 2176
2176

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









