




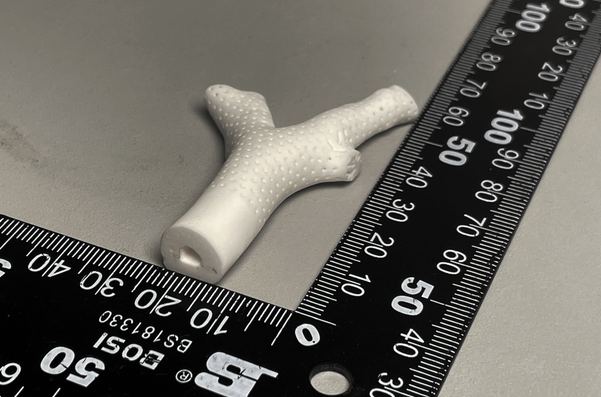
在功能陶瓷的研究与应用探索中,实验件往往承载着“验证思路、启发应用”的双重价值。图中展示的这款由氧化铝打印而成的分叉状样件,表面布满细密的点状纹理,整体形态类似枝状或分流管道——既是对陶瓷3D打印复杂成型能力的直观体现,也是科研人员进行仿生设计与功能拓展的重要载体。

这种形态并非单纯的造型尝试,而是指向潜在的应用逻辑:其分叉结构适合模拟流体在多通道中的分配与导引,能够在催化、过滤或微流控系统中发挥作用;粗糙化的表面特征则有利于生物细胞的黏附与生长,使其成为骨科再生研究的候选模型;同时,整体的中空与通道设计也为力学性能测试和多尺度结构优化提供了实验平台。可以说,这一类小巧却精妙的打印样件,不仅见证了数字化设计与高精度成型的深度融合,更提示了陶瓷在跨学科应用中的多样前景。

打印设备
打印设备ADT-3D-ZP-Printer-288-75
STL模型切片
打印过程
打印过程(光强为45mW/cm2,层厚0.05mm,调节曝光时间为1.5s,铺料速度为120mm/s)

烧结过程
烧结展示

烧结后成品展示
#增材制造 #3D打印
欢迎转发
千人行业专家交流Q群:248112776
延伸阅读:
3.干货总结:激光3D打印光束整形,光斑类型及熔化特点系统性介绍
4.国内3D打印行业8-9月融资非常火爆,16笔交易中最高达3.5亿!


















 375
375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









