



10 月 27 日,全球机器人开发者年度盛典ROSCon 2025 在新加坡拉开帷幕。作为连续举办 13 届、覆盖全球 11 个核心地区的行业顶级盛会,本届大会汇聚了全球 ROS 开发者群体的目光,共同探讨开源机器人技术的未来方向。
阿加犀作为高通全球重要合作伙伴,携端侧VLA 机械臂系统首次亮相,同步宣布将登陆上海会场,以“双会场联动”模式展现中国端侧 AI 技术的全球化实力。
VLA 机械臂引关注 端侧 AI 重构数据采集逻辑
在高通展台现场,阿加犀展示的端侧VLA机械臂成为焦点展品。
该机械臂通过APLUX 的模型端侧适配迁移技术,采用高通跃龙™️QCS8550芯片的强大边缘计算能力,可实现高效、精准的机械臂动作数据采集。
摇操动作指令将被实时捕捉并转化为机械臂的执行数据,相比于主从臂方式会更灵活,适合在复杂、非结构化环境中采集数据。
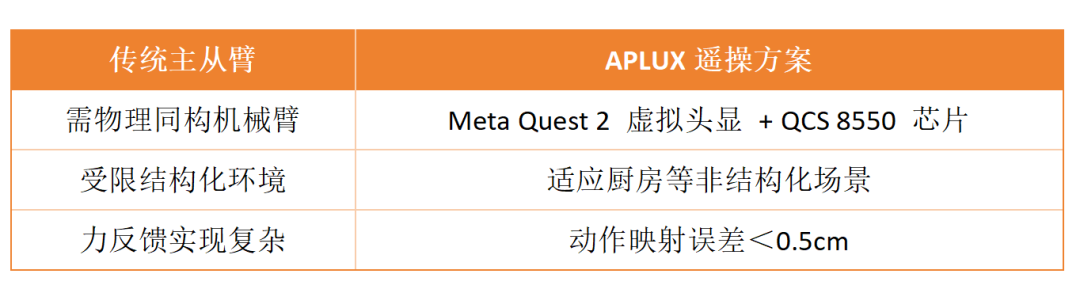
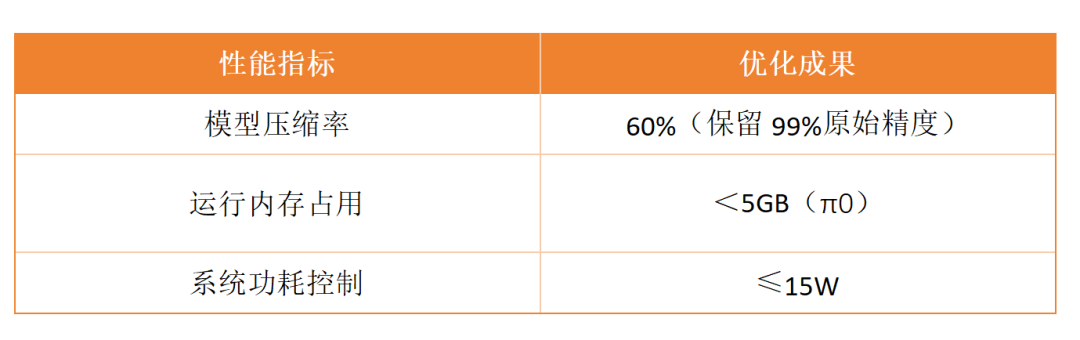
相较于传统主从臂方案,阿加犀VLA机械臂能在保留99% 原始精度的前提下实现 60% 压缩率,内存占用低于 5GB,功耗控制在 15W 以内,完美适配边缘端严苛运行环境。
借势ROS 生态 出海战略再提速
此次新加坡亮相是阿加犀全球化布局的重要落子。
依托高通全球资源网络,阿加犀已在东南亚、美国、日本等市场建立技术服务体系,其基于端侧AI的机器人解决方案已通过成都大运会警务服务、养老院等场景验证。
“ROSCon 是连接全球开发者的关键纽带。” 阿加犀COO史硕表示:“新加坡会场的技术交流将加速我们与海外生态的融合,而上海会场将进一步联动国内开发者,形成‘技术输出 + 生态共建’的全球化闭环。”

10月31日—11月1日,全球机器人领域顶级盛会ROSCon China 2025在上海盛大召开。阿加犀智能科技受邀重磅出席,并于11月1日下午由机器人事业部算法工程师康斌带来《ROS-VLA:迈向端侧部署的机器人 “通用智能” 时代》专题演讲,深度解析开源生态与端侧智能的融合路径。


阿加犀深耕端侧AI领域多年,始终致力于推动大模型向机器人端侧的迁移与落地。VLA具身大模型在端侧机器人上的成功运行,其意义不止于技术突破,它打破了“大模型只能依赖云端算力”的行业认知,让机器人在边缘端就能实现“感知-理解-行动”的闭环通用智能。
这意味着工业质检、家庭服务、仓储物流等场景中,机器人可脱离云端依赖,实时处理复杂任务、自主决策行动,不仅大幅降低了数据传输的latency(延迟)与安全风险,更拓展了机器人在无网络、高实时性场景的应用边界。
通过整合高通平台先进的计算能力,协同叠加阿加犀独创的融合架构操作系统、端侧AI和机器人开发全栈工具链,让开发者能够毫不费力地设计、制作原型并部署下一代智能互联设备。
目前,阿加犀已经推出搭载高通跃龙平台的「犀牛派」算-控-交互一体开发板,内置融合架构操作系统和智能机器人全栈工具链,已同步支持行业最新具身大模型,为开发者提供高效的生产力引擎。结合阿加犀联合高通跃龙平台发布的端侧AI生态门户·模型广场内近400个即下即用AI模型资源支持,开发者将获得前所未有的开发体验。

算控交互一体开发板「犀牛派」为机器人开发者提供高效生产力引擎!「犀牛派A1」作为功能强大、高度集成、易于上手且面向未来的机器人开发平台,支持板上仿真,可流畅运行多种中等至复杂AI模型,支持多任务并行处理。



















 933
933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









