




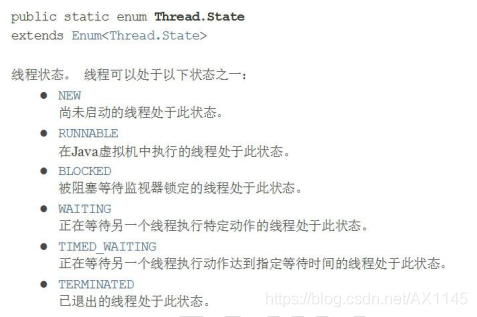
线程的生命周期状态:(六种)
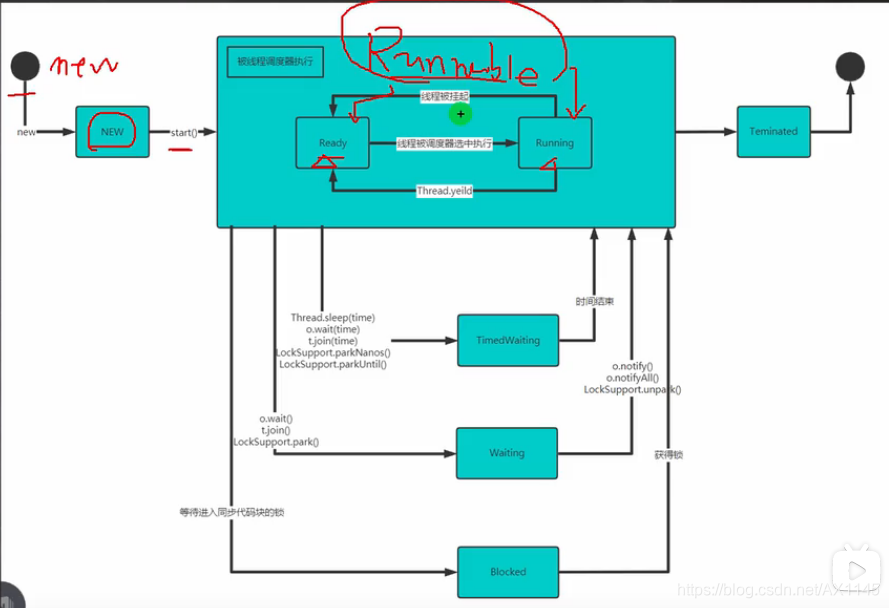
下图解释:创建线程 进入new 状态 执行start方法进入可执行状态runnable,可执行状态又分为两种子状态(准备状态【等待cpu调度】和运行状态)在可执行状态执行不同的方法进入不同的状态【TimedWaiting 超时等待】【Waiting 等待】【Blocked阻塞状态】,当线程执行完毕则从Running状态进入Terminated【终止】状态
package com.edu.threaduse; /** * @author mtl121 * @version 1.0 */ public class ThreadState { public static void main(String[] args) throws InterruptedException { T3 t3 = new T3();//状态:new 和 Runnable System.out.println(t3.getName() + "状态" + t3.getState()); t3.start(); while(Thread.State.TERMINATED != t3.getState()){ System.out.println(t3.getName() + "状态" + t3.getState()); Thread.sleep(500); } System.out.println(t3.getName() + "状态" + t3.getState()); } } class T3 extends Thread{ @Override public void run() { while(true) { for (int i = 0; i < 10; i++) { System.out.println("hi" + i ); try { Thread.sleep(1000); } catch (InterruptedException e) { e.printStackTrace(); } } break; } } }
Java多线程基础(二)生命周期
 本文详细介绍了线程的六种生命周期状态:New、Runnable、Timed Waiting、Waiting、Blocked 和 Terminated,并通过示例代码展示了线程状态之间的转换过程。
本文详细介绍了线程的六种生命周期状态:New、Runnable、Timed Waiting、Waiting、Blocked 和 Terminated,并通过示例代码展示了线程状态之间的转换过程。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











