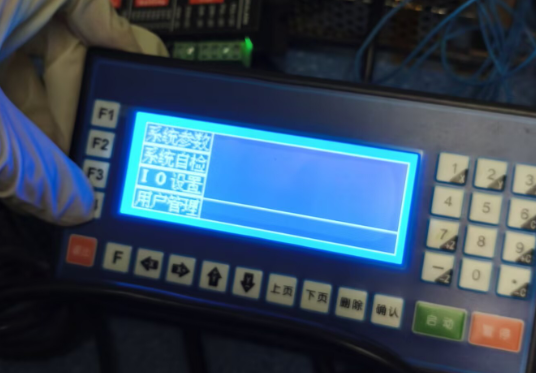
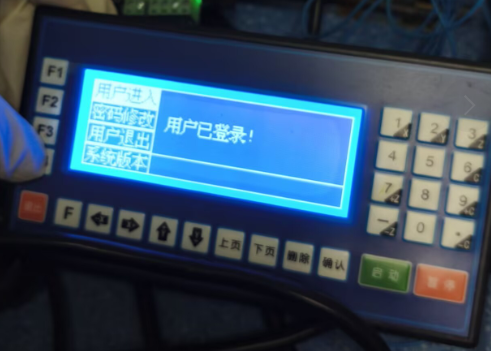
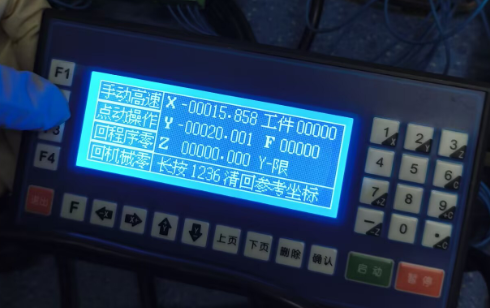
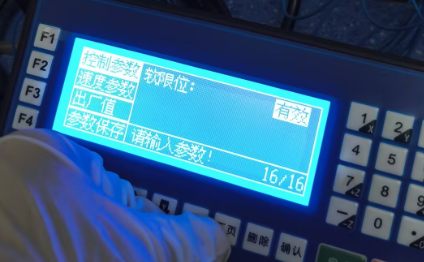
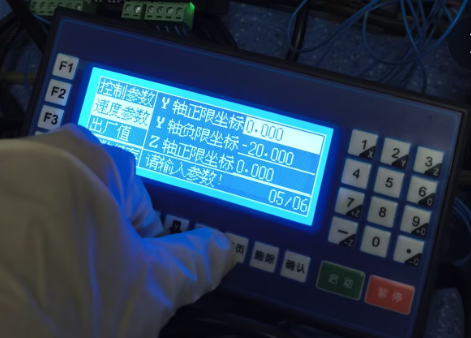
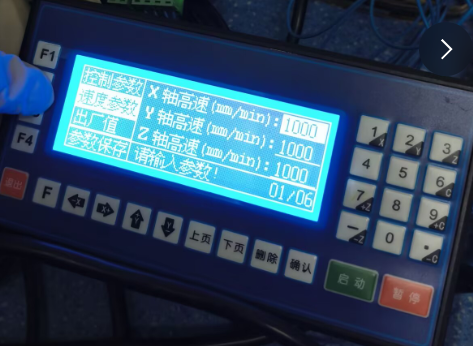
不设置限位老是超过量程哐哐响,坏设备 首先开机后界面是这样的,点“参数设置” 然后点“用户管理”,系统设置需要先登录用户,默认密码123456 成功登录会有下面的提示“用户已登录!” 然后回到主界面,将多轴平台手动操作到你觉得可以的归零点,长按1236清回参考坐标,这个操作就是让当前平台位置为0点,方便后面设置限位坐标。 然后将平台手动位移到限位的地方,记住X,Y的坐标,后面有用 下一步进入“控制参数”界面,一直按“下一页”会出现一个软限位,如果是“禁止”就按确定改成“有效”,然后才能输入软限位参数 然后在”速度参数“界面一直按下一页,会出现正/负限坐标,这个坐标就是刚刚让你记住的限位坐标,填进去就行,XY都得填,如果有Z也填一下,正限坐标就是0 最后点”参数保存“,切记得保存,不保存和没改一样,然后再操作设备,到达限位后就不会再移动

























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








