



介绍
Dectask 是一款基于人工智能的新一代高性能项目管理工具,专为现代团队打造。它兼具企业级功能与轻量级体验,在保持系统简洁易用的同时,提供强大的项目管理能力。 Dectask 完美平衡了功能丰富性与操作简便性,能够替代 Jira、飞书项目、Notion 和 Trello 等传统工具,让项目管理更智能、更高效。

安装方式
Dectask 提供了多种安装方式,你可以根据自己的需求选择合适的方式进行安装,安装方式有:
普通安装
一键安装
docker安装
docker-compose安装
系统要求
- 操作系统:Windows 7或更高版本,macOS 10.15 或更高版本,或 Ubuntu 18.04 或 Centos 7.0 或更高版本
- 内存:建议 4GB 或更多
- 硬盘空间:建议 10GB 或更多
- 浏览器:最新版本的 Chrome、Firefox 或 Safari
安装步骤
Dectask依赖Mysql数据库,所以需要先安装Mysql数据库。Redis数据库是可选的,建议安装和启用,以提高性能。
1.下载和安装Mysql8数据库
Dectask 依赖于 Mysql8 数据库,你需要先安装 Mysql8 数据库。根据你的操作系统,选择合适的版本进行下载:
安装Mysql后,使用Mysql客户端如Navicat或Mysql Workbench,创建数据库dectask,字符集为utf8mb4,并创建用户dectask和密码。 同时解除Mysql严格模式。
-- 解除严格模式
SET GLOBAL sql_mode='NO_ENGINE_SUBSTITUTION';
-- 创建数据库dectask
CREATE DATABASE IF NOT EXISTS dectask CHARACTER SET utf8mb4 COLLATE utf8mb4_unicode_ci;
-- 创建用户dectask,密码
CREATE USER 'dectask_user'@'%' IDENTIFIED BY 'dectask_password';
-- 授权用户dectask_user
GRANT ALL PRIVILEGES ON dectask.* TO 'dectask_user'@'%';
-- 刷新权限
FLUSH PRIVILEGES;2.下载 Dectask
根据你的操作系统,选择合适的版本进行下载:
将下载好的文件解压到一个目录中,例如:/data/dectask,并赋予该目录读写权限
3.安装和启动 Dectask
将下载好的Dectask解压到一个目录中,例如:/opt/dectask 在解压后的目录中,编辑 config.yaml 文件,将数据库连接信息填写正确。
#其他内容暂不配置
mysql:
path: 'localhost:3306'
config: 'charset=utf8mb4&parseTime=True&loc=Local'
dbname: 'dectask'
username: 'dectask'
password: '修改为自己的密码'安装过程需要打开命令行窗口,切换到Dectask目录,执行以下命令安装Dectask。
./dectask install zh_cn
# 安装成功后会输出管理员账号和密码,请牢记
# 装成功后会输出管理员账号和密码,请牢记安装成功后,执行以下命令启动Dectask。
./dectask守护进程方式运行
./dectask -d停止和重启命令
./dectask stop
./dectask restart之后就可以在浏览器 http://localhost:8888/login 上访问 Dectask 了.如需要修改端口,可以在config.yaml中修改.
登录界面如下
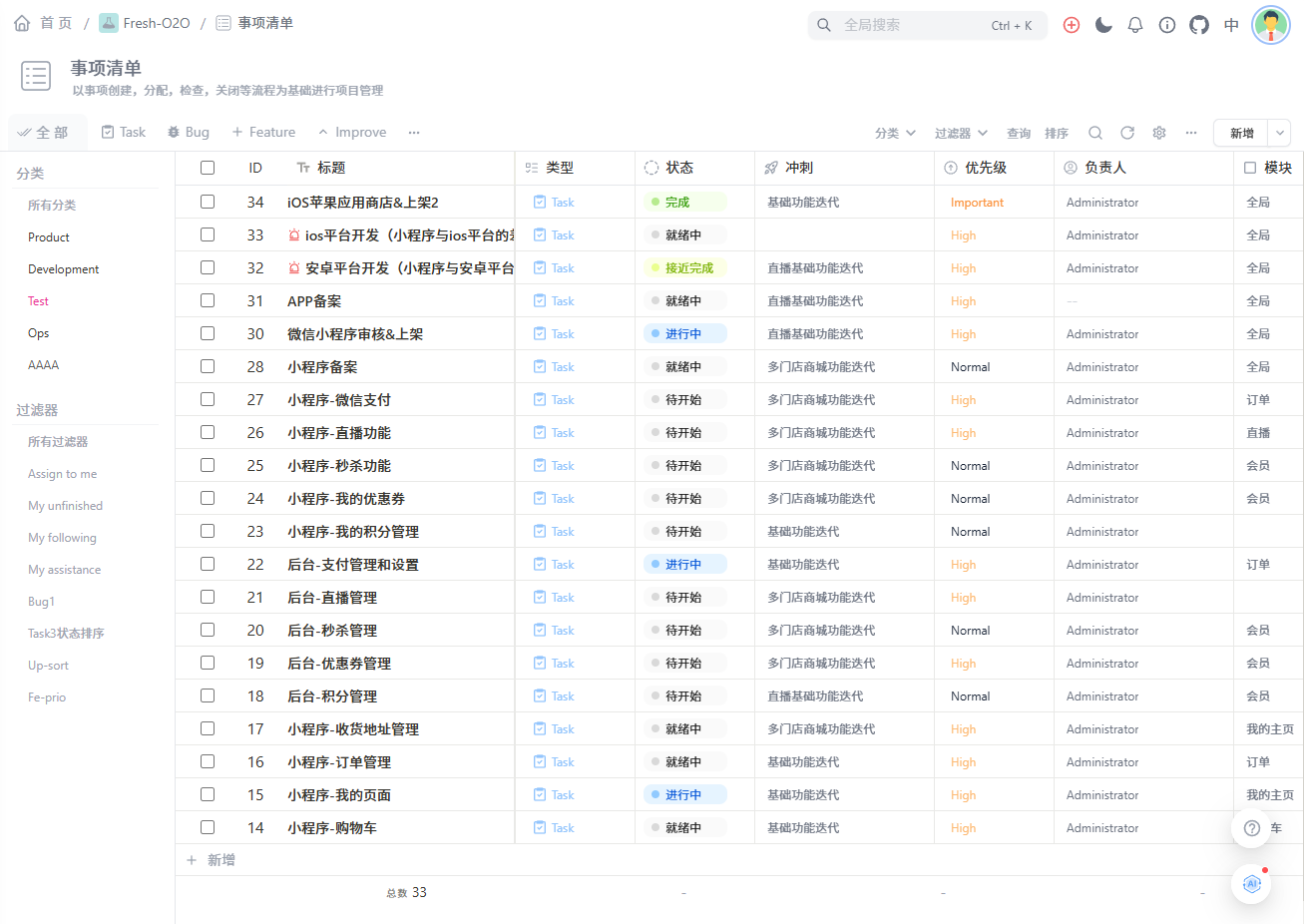
事项管理界面
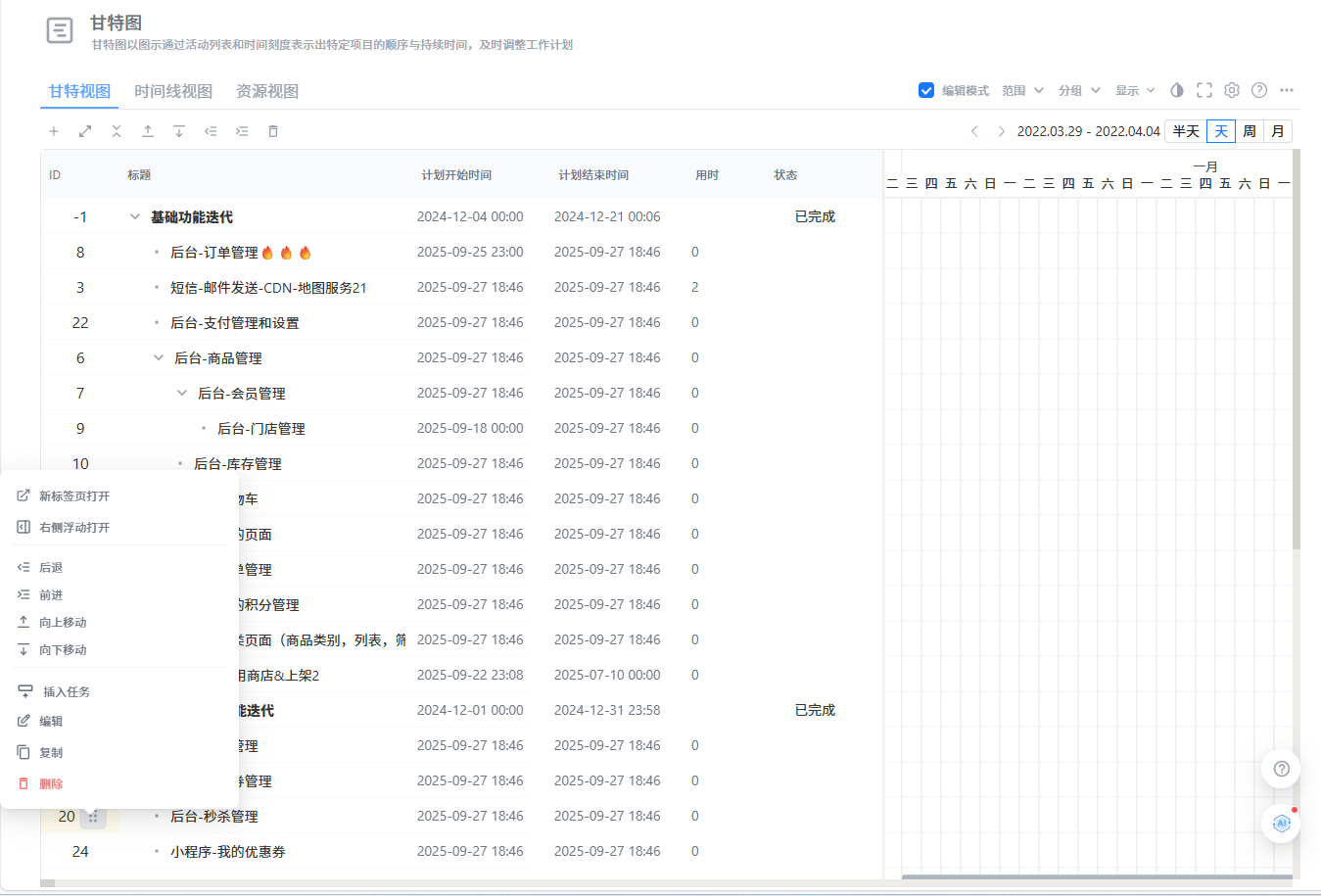
甘特图界面
4.安装和启用Redis(可选)
Dectask 建议安装和启用 Redis 数据库,以提高性能。根据你的操作系统,选择合适的版本进行下载:
- Redis下载:下载链接
安装 Redis 后,编辑 config.yaml 文件,将 Redis 连接信息填写正确。
#redis配置,根据实际情况修改
redis:
db: 0
addr: '127.0.0.1:6379'
password: ''重启命令
./dectask restart
















 2048
2048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









